
基于LabVIEW的倒车自动刹车系统开发
传感器的引脚定义如表1所示:
本文引用地址:http://www.amcfsurvey.com/article/147867.htm
通过Time-of-Flight(TOF)算法计算发射波与接收波的时间差,从而得出超声波探头与障碍物间的距离,其距离计算公式如(1)式所示:
D=(c*t)/2 (1)
式中D为超声波传感器与障碍物的距离,c为声波在空气中的速度,t为发射波与接受波的时间差。
3.2.2 方案设计及指标设定
由图3可知超声波传感器的激励波脉冲时序在发射周期初始阶段连续发射14个40kHz的脉冲串后持续低电平至周期结束,属于非常规信号源,对外围硬件电路设计造成极大困难。针对此问题,LabVIEW DAQ平台的相关设备则降低了采集系统构筑的难度。
▲ 采用的NI cDAQ-9178为8槽USB机箱,具有50多个结合集成信号调理的可热插拔I/O模块,机箱中内置4个通用32位计数器/定时器,并可借助使用DAQ Assistant的NI-DAQmx软件自动代码生成
▲ NI 9269采用单通道输出14个12V、40kHz的模拟电压信号后持续低电平,信号周期30ms
▲ NI 9221采用单通道模拟输入模块,采样频率1kHz,采样点数1k
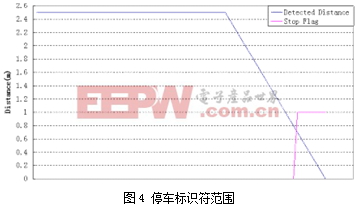
本系统属低速控制范围(即车速低于5Km/h),为保证驾驶员的安全性同时避免车辆碰撞障碍物,依据运动学公式V02=2aS设定预定警戒距离为70cm。并在开发程序过程中设定70cm为停车标识符(StopFlag),如图4。
3.3 刹车控制模块
3.3.1 车辆模型
车辆数学模型的建立有利于验证系统的可行性,北科大的陈柏全教授在Matlab/Simulink平台上构建如图5所示的车辆纵向模型。
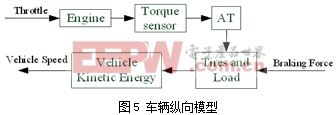
为了减小车身零部件对系统的非线性因素导致的累积误差影响,本系统仅通过试验车的电动真空助力泵(EVB)所提供的助力实现制动力输出。
根据牛顿第二定律可建立车辆纵向模型的一阶线性微分方程,如(2)式所示:
式中Mv 为车身质量,v为实时车速,Fb 为制动力,Fa为空气阻力,g为重力加速度,θ为路面坡度,Fθ为怠速驱动力。
3.3.2 速度曲线规划
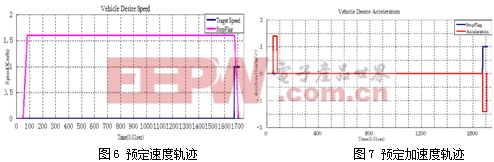
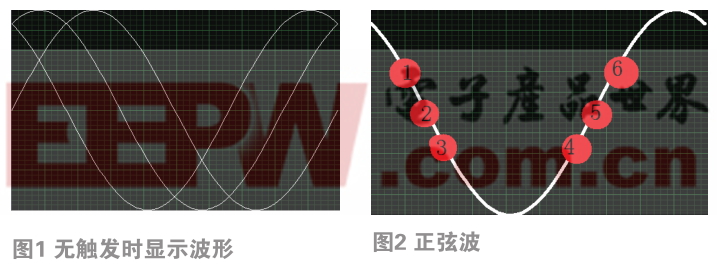
规划的曲线必须尽可能的平顺并且没有紧急制动情况的出现,在速度控制领域内有多种方法可实现。但对于如何使驾驶员在加减速时感觉较舒适,则是目前速度控制领域内比较重要的课题。Kyongsu Yi的论文中指出,驾驶员感到较为舒适的加减速不应高于2.5m/s²。根据此研究成果,本系统的预定速度设定为1.6Km/h如图6,预定加速度设为1.4m/s²如图7,理论上的车辆制动距离为7cm。根据图6的预定速度轨迹可将其分成加速、匀速以及减速三个状态,首先控制车速以定加速度从0Km/h升至1.6Km/h;若系统监测到StopFlag为0(即车—障碍物在停车范围以外),系统维持车速处于匀速状态即以1.6Km/h定速行驶;若系统监测到StopFlag为1(即车—障碍物在停车范围以内),则进入减速状态,速度以定加速度从1.6Km/h降至0Km/h。
加速度计相关文章:加速度计原理














评论