
五相混合式步进电动机走步均匀性分析
五相混合式步进电动机走步均匀性分析
文章对五相混合式步进电动机采用下桥臂电流恒定不变式恒流斩波驱动时的步进均匀性进行了详细分析,针对存在的不足,提出了下桥臂电流恒定值可变式恒流斩流驱动方案。?
关键词:混合式步进电动机;斩波;驱动电路
Step Uniformity Analysis for 5phase Hybrid Step Motor
WANG Youjun
(Institute of Sciences, PLAUST, Nanjing 210016, China)
Key words: hybrid step motor; chopping; driving circuit
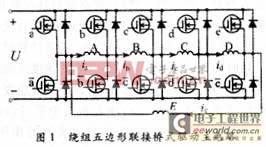
开环工作方式下,步进电动机走步的均匀性与驱动电路形式密切相关。五相混合式步进电动机主电路驱动控制方式有升频升压驱动和定压恒流斩波等驱动方式,定子绕组联接有五相星接、五边形联接和五相全H桥联接三种方式。定压恒流斩波驱动适合于对高速力矩和抗冲击性有高要求的场合。实践中发现:驱动主电路采用下桥臂电流恒定值不变式定压恒流斩波,定子绕组五边形联接时,电机在低频率下运行,有走步不均匀性现象。本文对此进行了详细分析,并提出了下桥臂恒流值可变式恒流斩波驱动方案。
 ?
? 式中N—每相绕组的串联匝数;NI—每相绕组的磁动势;Z2—转子的齿数;θ—矩角;Ad—直轴磁导;Aq—交轴磁导。
电磁转矩最大值Tmax与每相绕组磁动势(或相电流)的平方成正比,所以步进电动机属于对绕组电流十分敏感的传动电动机。
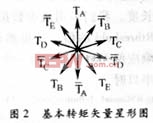
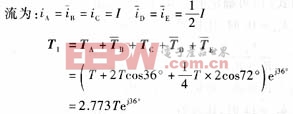
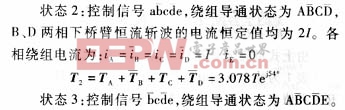
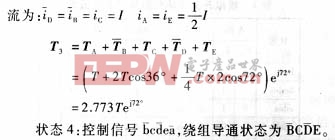
主电路如图1示,下桥臂电流恒定值固定为相绕组额定电流的两倍2I。以半步运行为例,4-5励磁的20种通电状态中4相励磁与5相励磁交替进行,根据环分控制逻辑不难分析,主电路稳态等值电路基本结构为4拍一循环,所以单步响应特性也是4拍一循环。混合式步进电动机的驱动控制主要体现为对转矩矢量的控制,而绕组电流又直接与转矩相关。以一相绕组通以额定电流I产生的定位转矩T为基准,首先分析相邻4拍 绕组电流及其相应派生定位转矩矢量的变化规律。
派生定位转矩矢量为:

派生定位转矩矢量为

派生定位转矩矢量为
 ?
?
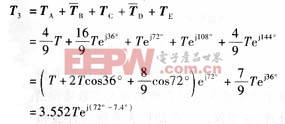
从以上分析可以看出:派生定位转矩矢量变化不均匀,表现在大小上不一样,转矩波动相当明显,最大值是最小值的2.15倍;相位变化也不均匀,5相励磁产生了附加步距误差。这些因素反映在步进电动机低频运行时,走步有明显的“强”“弱”或“重”“轻”,加剧了电机的低频震荡,这对低速工作是不利的,另外步矩角的不均匀也影响到系统的脉冲当量。
派生定位转矩矢量为:
派生定位转矩矢量为
派生定位转矩矢量为
? 从以上分析可以看出:派生定位转矩矢量变化不均匀,表现在大小上不一样,转矩波动相当明显,最大值是最小值的2.15倍;相位变化也不均匀,5相励磁产生了附加步距误差。这些因素反映在步进电动机低频运行时,走步有明显的“强”“弱”或“重”“轻”,加剧了电机的低频震荡,这对低速工作是不利的,另外步矩角的不均匀也影响到系统的脉冲当量。
若改下桥臂恒流斩波的电流恒定值随绕组励磁状态变化,可以改善定位转矩矢量变化的均匀性。具体分析如下。

条件:B相下桥臂恒流斩波的电流恒定值为2I;D相下桥臂恒流斩波的电流恒定值为1.5I。各相绕组电
条件:D相下桥臂恒流斩波的电流恒定值为2I;B相下桥臂恒流斩波的电流恒定值为1.5I。各相绕组电
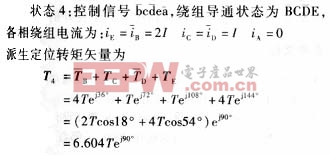
条件:D相下桥臂恒流斩波的电流恒定值为2I;A、E相下桥臂恒流斩波的电流恒定值为I;各相绕组电

由以上分析不难看出,派生定位转矩矢量变化的均匀性得到较大改善,转矩波动相当小,最大值仅是最小值的1.11倍,且无附加步距误差。
条件:B相下桥臂恒流斩波的电流恒定值为2I;D相下桥臂恒流斩波的电流恒定值为1.5I。各相绕组电
条件:D相下桥臂恒流斩波的电流恒定值为2I;B相下桥臂恒流斩波的电流恒定值为1.5I。各相绕组电
条件:D相下桥臂恒流斩波的电流恒定值为2I;A、E相下桥臂恒流斩波的电流恒定值为I;各相绕组电
由以上分析不难看出,派生定位转矩矢量变化的均匀性得到较大改善,转矩波动相当小,最大值仅是最小值的1.11倍,且无附加步距误差。
按照改进方案,每相下桥臂恒流斩波的电流恒定值随绕组励磁状态变化,在下桥臂开通时根据励磁状态不同有I、1.5I和2I三种取值,电路如图3,通过开关切换改变电阻分压值得到所要求的电流设定值。模拟开关k1a和k2a可采用CD4066集成电路实现。
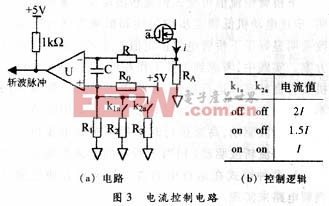
由式(1)可确定电阻R?0和R?1的阻值。
k1ak2a=10时,比较器U“+”端门限值为
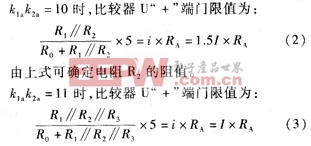
由上式可确定电阻R3的阻值。
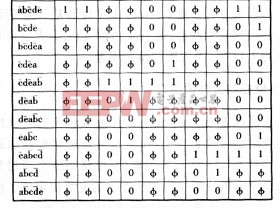
表1为整个五相电流控制开关与环分信号对应的开关真值表。某相下桥臂未开通时,表中的逻辑值为随意值。开关真值表可结合环分信号用EPROM或CPLD等器件来实现。













评论