
基于 AVR 单片机的自动对靶喷雾控制系统设计
3.4 输出控制
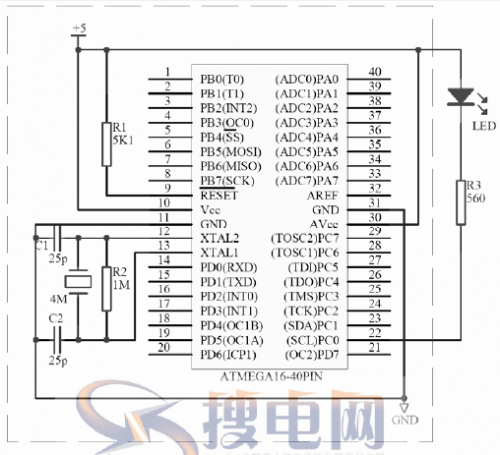
单片机的控制信号通过 PC0 引脚输出。PC0 接固态继电器(SSR),通过固态继电器控
制电磁阀的开闭。当 PC0 为高电平时,继电器吸合开关,接通电源,打开电磁阀进行喷雾;
当 PC0 为低电平时,开关断开,电磁阀关闭,不进行喷雾。
4. 软件结构设计
自动对靶控制系统运行程序采用 C 语言编写,采用模块化设计,整个程序由功能模块
子程序构成。上位机软件是基于 Visual C++6.0 开发的。
4.1 下位机软件结构
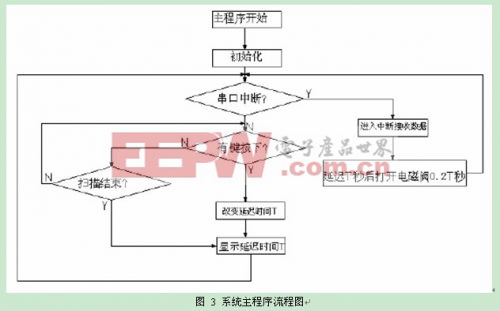
下位机软件的主要软件模块有初始化、延时、显示、键盘扫描、中断处理等功能模块。
其中延时函数采用循环计数的方法,单片机晶振频率为 7.3728MHZ,计数循环次数为 1832,
在 AVR Studio 下仿真,1ms 误差为 0.44us,所以完全可以满足实际要求。初始化时延迟时
间为 0.0s,串口为异步通信模式,8 位数据位,2 位停止位,波特率设为 9600。其主程序流
程图如图 3 所示。
4.2 上位机软件结构
上位机软件是基于 Visual C++6.0 开发的。上位机软件主要由两部分组成:(1)串口通信
部分,(2)图像处理部分。
其中串口通信通过串口类 CSerialPort 实现[3]。图像处理部分采用采集卡实时采集图像,
该系统的图像采集卡为嘉恒中自公司的 OK_C30A 采集卡。该卡是基于 PCI 总线,能采集彩
色又能采集黑白图像的采集卡,适用于图像处理、工业监控和多媒体的压缩、处理等研究开
发和工程应用领域[8]。通过该公司提供的 API 实现图像的采集和显示。图像的实时采集通过
VC 中的响应 WM_TIMER 消息实现,即每隔一定时间通过在 OnTimer 函数中调用采集卡的
API 将图像采集进来并显示。而由于杂草为绿色,所以用 2g-r-b 分量对图像进行分割[4],当
其值大于一定阀值后便认为此像素为绿色,当绿色像素所占整个图像超过一定比例时便判定
摄像头下有杂草,然后通过串口将信号发送给下位机。
5. 实验结果
本实验在直径 67cm 的转盘上进行,通过转盘转动模拟拖拉机的行走。本实验测定了不
同转速下的实际对靶延迟时间,其中每个转速下用秒表测定 20 次,实验数据如表 1 所示
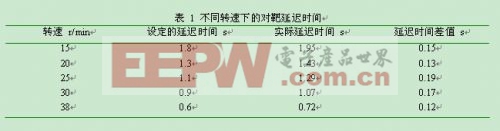
设定的延迟时间即软件中的延迟时间 T,实际延迟时间为摄像头从采集到靶标图像到执行机
构进行喷雾之间所经过的实际时间。其能实现自动对靶的最大转速为 38r/min 即 1.33m/s。
而且通过表 1 数据可知,延迟时间误差小于 0.2s,可满足自动对靶的要求。
6. 结论
本系统通过对电磁阀的控制实现了农药喷施的自动对靶,并在实验室条件下调试成功。
该系统运行稳定,延时准确,在一定速度范围内能实现精确对靶,从而大大提高了农药的利
用率,并且硬件实现简单,为进一步在田间推广打下了很好的基础。若能进一步优化图像处
理算法,减少图像处理时间,以及提高硬件的响应速度,从而提高能响应自动对靶的行走速
度,并且提高图像处理算法处理复杂背景下的杂草识别的能力,实现在田间复杂环境下的自
动对靶喷雾。




评论