
无线传感网多簇头协助的目标跟踪
在基于线性拟合的算法中较传统的算法是根据k 和k+1时刻的测量值来预测k+2 时刻的位置,易造成预测不准确及目标节点丢失的现象,但是对于传感器网络来说能量因素至关重要,因此应在计算复杂度低的前提下想方设法提高跟踪定位精度.本文基于线性拟合的思想,分析跟踪过程中的特点,选择合适的预测数据并采用多簇头结构,以提高跟踪精度.降低目标丢失率.
2 相关工作
2.1 预测数据选取
目标运动轨迹虽然无规律可寻,但在相当长的一段时间内它的运动趋势保持不变.如图1 所示,为目标在二维平面上沿X 轴正向运动时的情况(图中轨迹为任意曲线,为描述方便当目标发生转弯时称其为到达极值点).可见目标在两个极值点之间时,沿X 轴和Y 轴的增减性不变;当到达极值点时,沿X 轴或Y 轴的增减性将会发生变化.既然目标在两个极值点之间运动趋势不变,可以根据这段时间内的历史数据来预测该段轨迹,即利用趋势相同的一段数据来预测目标节点下一位置,此时将极值点作为分界线.
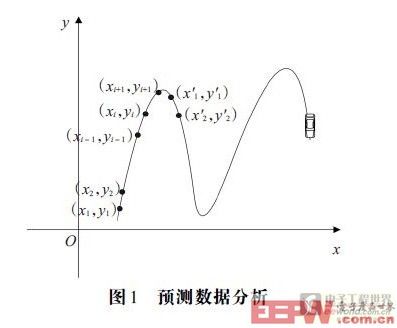
运用符号函数来判断是否到达极值点.如图1 所示,当目标沿X轴正向运动时,若满足Sgn(xi-xi-1)* Sgn(yi-yi-1)==Sgn(xi+1-xi)* Sgn(yi+1-yi),则说明目标未到达极值点,相反则说明目标到达极值点;当目标反向运动时,X 轴和Y 轴的增减性同时变化.
集合F 用于存放预测所需的历史数据.在到达第一个极值点之前可以用(x1,y1).(x2,y2)…(xi,yi)来预测(xi+1,yi+1)的位置,此时集合F={(xr,yr)|r=1,2,…,i}.利用符号函数判断目标是否达极值点,若到达极值点,即Sgn(xi-xi-1)*Sgn(yi-yi-1)/Sgn(xi+1-xi)* Sgn(yi+1-yi),则清空集合F中的所有数据项,将当前定位坐标及前一次的定位坐标放于F中,组成新的数据信息集合;否则,不断地向集合F中加入新的数据项.
2.2 多级簇头结构
利用不同级别的簇头在不同阶段完成不同的任务,最终达到提高定位跟踪精度.降低目标丢失率的目的,将簇头分为:主簇头.辅助簇头和预备簇头.
主簇头的选取需要兼顾剩余能量及与目标节点距离两个因素,且应选择能量较大.与目标距离近的节点作为主簇头.设当前簇头i 的剩余能量为Ei,测得与目标的距离为Di,根据式(1)计算簇头i 的阈值Ti:

其中ci表示趋向因子,初始值为1.趋向因子表示目标未来运动方向更趋向于哪个簇头节点,若趋向于簇头节点i,则簇头节点i 周围的预备簇头节点将较早地监测到目标节点的信息,趋向因子由辅助簇头接收到预备簇头的个数决定.
初始时主簇头由发现目标的哨兵节点担当;当目标丢失后利用恢复机制追踪到目标并重新建立跟踪机制,此时主簇头由发现目标的簇头节点担当.除上述两种情况外,主簇头均通过比较当前各辅助簇头的阈值,选取阈值较大的节点作为下一阶段的主簇头.主簇头选定后,其邻接簇头节点作为辅助簇头,辅助簇头的邻簇头节点作为预备簇头,建立起跟踪机制,如图2 所示.
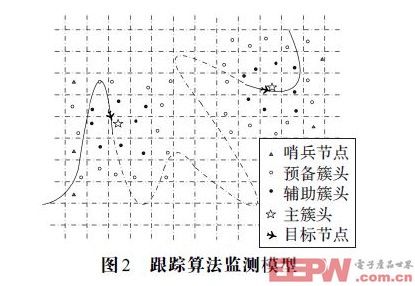
三种簇头完成不同的任务.主簇头主要完成簇内节点信息的融合并对辅助簇头信息进行加权融合形成最终定位位置;辅助簇头接收簇内节点发来的信息进行初次定位,并把定位结果发送给主簇头;预备簇头一方面做好监测目标的准备,一方面防止目标丢失,其簇内节点处于休眠状态.当预备簇头感测到目标信息时告知辅助簇头,辅助簇头将预备簇头看做簇内节点,融合预备簇头发来的信息,并记录预备簇头的个数,在进行主簇头选举时作为趋向因子的值.
3 目标跟踪算法
3.1 目标监测模型
采用网格结构将整个监测区域划分为许多虚拟单元格,每个单元格内的传感器节点组成一个簇,当簇头节点能量小于某个阈值时进行簇头更换,且每个节点都有两种状态:监听和休眠状态.
节能是无线传感器网络研究中一个重要的评价指标,许多学者从能量因素出发研究跟踪算法.为了节省传感器节点的能量,当没有目标出现时应使大部分节点处于休眠状态,只需少量节点用于监测目标是否出现.本文在监测区域边界设置哨兵节点(由边界的簇头节点充当),用于侦测是否有目标进入监测区域.边界簇头周期性地随机生成一个0~N 之间的数,若该数大于N/2(N 为边界节点的总数),则该簇头节点为哨兵节点,为防止哨兵节点能量殆尽,需要进行簇头选举,比较哨兵节点的剩余能量和某个阈值的关系决定是否选举簇头.哨兵节点处于监听状态,非边界簇头节点和簇内节点处于休眠状态.当目标出现时由哨兵节点唤醒其邻簇头节点作为辅助簇头,辅助簇头节点唤醒其非主辅簇头节点作为预备簇头,建立监测机制.
通信过程中,传感器节点只需进行相邻节点之间的通信,假设网格的边长为r,则通信半径为2r;辅助簇头节点和主簇头节点要对目标进行定位,则设传感器的感知半径2 r .簇头的选举均采用文献11的策略,且各传感器节点均具有简单的计算能力,跟踪算法监测模型如图2所示.
3.2 目标侦测与定位
哨兵节点发现目标后,立刻唤醒邻簇头节点,邻簇头节点相继地唤醒簇内节点进行监测.初始时哨兵节点作为主簇头节点建立跟踪机制,随后主簇头.辅助簇头协同其簇内节点开始监测目标发出的信号并进行定位.
传感器节点之间可以通过发射的信号来确定彼此之间的距离,其中可测距的算法包括TOA(Time Of Arrival)算法.TDOA(Time Difference Of Arrival)算法.AOA(AngleOf Arrival)和RSSI(Received Signal Strength)算法.由于传感器节点自身会发出RSSI 信号,且根据信号的强弱可以独立获得距离值,所以本文采用RSSI 算法,其中感测节点根据测量的接收信号载波功率计算出与目标之间的距离dij表示为:
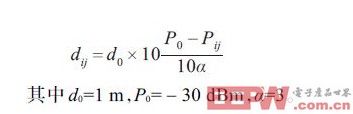
其中d0=1 m,P0=-30 dBm,α=3.
簇内节点接收到目标信号后将信息发送到簇头节点,簇头节点利用多边测量计算出目标的坐标.设在t 时刻,簇头节点i 内有k 个传感器节点,其坐标分别为(x1,y1),(x2,y2),…,(xk,yk),监测到与目标节点(x,y)的距离分别为d1,d2,…,dk,根据多边形的定位模型有:
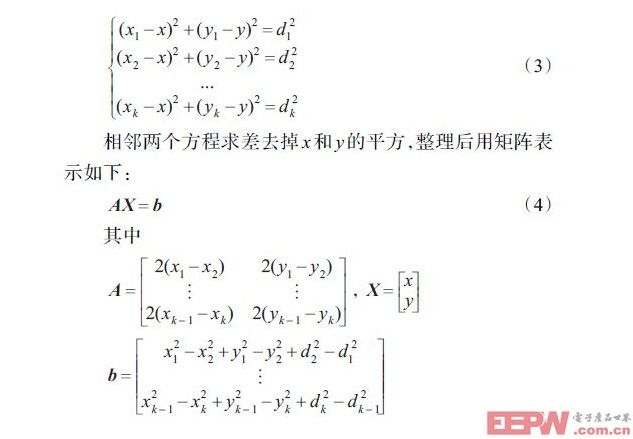
由于存在测距误差,因此加入随机误差向量ξ(ξ为n-1维),有AX + ξ = b .利用最小二乘算法取ξ最小值时的X值.设 Q(X) = ξ2 = AX – b2 ,对X求导得到目标的估计位置:

通过式(5),初步计算出目标节点坐标,随后辅助簇头将定位信息发送到主簇头节点,主簇头融合n-1 个辅助簇头发来的信息通过式(6)求其均值,得到最终的目标位置.
在整个网络工作中三种簇头相互转化.主簇头判断接收到的相邻两次信号差,若信号差小于零即表明目标远离主簇头节点,此时主簇头节点发送重新选举主簇头的消息,收到此消息的辅助簇头计算自己的阈值Ti并发送给主簇头节点,主簇头节点选择阈值最大的节点作为下一次的主簇头节点,自己退却为辅助簇头节点,更新跟踪机制;当辅助簇头节点及其簇内节点接收不到目标信号时,该辅助簇头的簇内节点睡眠,自己变为预备簇头;预备簇头若接收到目标的信号,且跟踪机制更新使它的一个邻节点成为主簇头节点时,预备簇头转化为辅助簇头,唤醒簇内节点进行定位;但当预备簇头发现其邻簇头节点为预备簇头或普通簇头时,则停止工作变为普通簇头节点.

传感器相关文章:传感器工作原理







评论