
基于LabWindows/CVI的舵机负载模拟系统设计
从控制软件的流程图可以看出,在上位机软件运行过程中采用了多线程技术。这种设计可以更加有效的利用CPU的性能。由于多线程间方便的通讯机制,几个线程可以共享数据空间,大大减少了启动线程所需的空间和线程间彼此切换的时间,使应用更加快捷与方便。同时,多线程技术的采用,也使得程序的逻辑与控制方式更加简单,便于理解与修改。在测控软件设计与应用过程中,对数据采集的实时性要求很高,这需要系统有较高的采样频率,使用高精度的定时器是满足系统需求的关键。在本文的舵机负载模拟系统中,使用了多媒体定时器对控制进程进行管理,其精度很高,最小误差约为1 ms,且多媒体定时器的优先级较高,可以减轻资源紧张时对定时器运行的影响。
本文引用地址:http://www.amcfsurvey.com/article/270763.htm3系统控制策略
在舵机负载模拟系统的控制过程中,最大的难点在于对系统运行时产生的多余力进行抑制与消减。
多余力是由承载系统(舵机)的主动运动造成的。承载系统的主动运动,会拖动加载系统(负载模拟器)与其一起运动,在加载作动筒两腔产生强迫流量,引起多余力。多余力的大小与运动的速度和加速度密切相关。同时,多余力具有微分特性,不仅超前于加载力,并且会随着承载系统运动频率的增加而迅速增大。为此,在控制系统设计时,必须采用合理方法,将多余力抑制并消减到一定的范围内。
为了对负载模拟过程中出现的多余力进行抑制,很多学者做出了研究。杨刚等采用模糊自适应控制策略,能较好的消除多余力,但模糊控制器的建立过程太复杂且可移植性差,石旭东等采用CMAC与PID并行控制方法,自适应能力较强,但神经网络学习过程具有较大的不确定性。罗璟等引入H∞控制方法,但这种方法需要建立系统的精确数学模型。
结合工程实际情况,分析项目中舵机负载模拟系统的特点,在对舵机负载模拟系统进行控制时,系统的运动谱(舵机运动规律)和载荷谱(负载模拟器运动规律)都是已知的。所以可以根据结构不变性原理,在计算要输出的控制信号时,预先施加一个适当的前馈补偿,以达到减少外部扰动的目的。
舵机负载模拟系统如图4所示,其中d为干扰输入。根据结构不变性原理,为了消除干扰d对系统的影响,理论上需要满足条件Gf(s)G1(s)+G3(s)=0,即需设计一个前馈补偿环节Gf(s)=-G3(s)/G1(s)。

图4 前馈补偿原理
在设计前馈补偿环节时,以加载输出端的位移做为前馈补偿环节的输入信号。这样选择有两个突出优点。一是采用加载输出端的位移做补偿输入时,消除了连接机构的弹性形变以及惯性负载引起的滞后与衰减作用的影响,简化了负载模拟系统的动态特性,使补偿后的系统被简化成一个二阶环节,有助于提高负载模拟系统的闭环动态性能。二是当采用加载输出端位移为补偿输出时,负载模拟系统控制器中的所有传感器检测信号与执行机构控制信号均在加载系统一侧,在结构上保持了负载模拟系统的独立性。
4系统实现与试验结果
根据上述各部分的分析与设计,完成了舵机负载模拟系统的硬件平台搭建和软件程序的编写与调试。经过一定的调试,达到了理想的控制效果。试验设备在相应载荷指令下的响应如图5所示。根据试验结果可知,实际响应对指令的动态跟踪效果很好,满足了系统的要求。
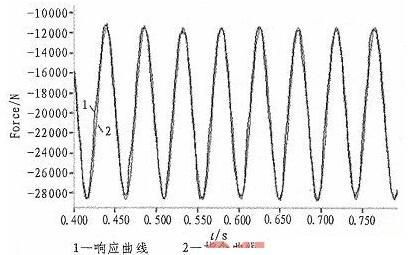
图5 实验结果图
5结论
本文基于LabWindows/CVI开发环境,对舵机负载模拟系统进行分析与设计。经实践证明,该系统能对舵机载荷进行实时、准确的模拟,具有很好的控制效果,充分满足了试验要求。同时,本文提及的舵机负载模拟系统设计方法,对同类的电液负载模拟器的设计也具有一定的借鉴与参考价值。

模拟信号相关文章:什么是模拟信号
电子负载相关文章:电子负载原理









评论