
某导弹再入空气舵机单元测试模拟训练装备
作者 崔洪亮 火箭军士官学校(山东 潍坊 262500)
本文引用地址:http://www.amcfsurvey.com/article/201806/382307.htm摘要:从分析影响某型号导弹再入空气舵机单元测试教学训练效果的制约因素出发,利用PLC智能控制、机电液一体化技术、虚拟现实等方法,研制了某导弹再入空气舵机单元测试模拟训练装备。介绍了某导弹再入空气舵机及其工作原理,在此基础上对系统硬件各功能模块的设计制作过程进行了阐述,并对系统软件的设计思路和实现方法进行了说明。试验结果表明,该系统性能稳定、可操作性强,减少了动装用装次数,提高了教学训练效果,可延长导弹武器系统的使用寿命,具有较高的军事意义和经济效益。
0 引言
再入空气舵机作为导弹控制系统在导弹再入段飞行的执行机构,已被用于多种型号的弹道式导弹上,其控制精度和对控制信号的响应速度,对提高导弹的命中精度有很大的影响。对于再入空气舵机这样一个结构复杂、仪器精密的导弹武器装备,涉及电工、液压和空气动力学多方面的知识,并且再入空气舵机在地面测试过程中的通电时间有着严格的时间要求限制。目前在火箭军导弹基层部队训练和院校教学过程中,某型号导弹的再入空气舵机单元测试受通电时间所限,只能依靠教练员的讲解加上部分实装图片、Flash动画演示以及短期的操作训练进行岗位任职技能培训,这种方式方法已经无法满足火箭军士官应对实战化教学训练的需求,导弹再入空气舵机操作号手不能直观地认识和体验其内部部件的连接方式和工作过程,不利于操作号手深化原理、认知装备的训练需求,成为制约火箭军部队士官操作训练与院校理论教学的瓶颈问题。为了提高再入空气舵机测试操作的训练效果和教学质量,延长导弹武器设备的使用年限,研制了基于PLC的某导弹再入空气舵机单元测试模拟训练装备。
1 再入空气舵机简介
某导弹是我国遂行特定作战任务要求的杀手锏武器,为了提高突破PAC3爱国者导弹防御能力、提升精确打击能力,在导弹的再入飞行段,再入空气舵机通过对弹头飞行姿态(俯仰、偏航、滚动)的控制,实现弹头的机动飞行、景象匹配及克服干扰稳定飞行。某导弹再入空气舵机有4个相互独立的伺服控制回路,每个控制回路均由阀控作动筒、电液伺服阀、反馈电位计、伺服放大器等组成,再入空气舵机组成结构框图如图1所示。

伺服作动器是再入空气舵机的执行元件,将伺服阀输出的高压油转换成具有一定速度的活塞杆的运动并由此带动空气舵的摆动;电液伺服阀是舵机液压系统的转换和放大元件,将伺服放大器输出的功率很小的指令信号变换并放大成一定功率的高压液体油输入作动器,推动活塞杆运动;反馈电位计是系统的反馈元件,同时也是系统位移输出的监测元件;燃气涡轮动力装置根据控制系统指令,产生高温、高压的燃气流,吹动涡轮转子高速旋转,经减速器减速带动油泵转子旋转,输出——定流量——定压力的液压油,将涡轮的旋转机械能转化为液压能。
2 再入空气舵机的基本工作原理
导弹弹头再入大气层后,根据控制系统的指令,产生高温、高压的燃气流,吹动涡轮转子达到高速旋转并输出一定的转矩和转速,经减速器减速带动油泵,油泵输出一定流量和压力的液压油至空气舵机的液压系统,整个伺服系统处于零位待命状态。液压系统的溢流阀自动调节流向控制回路的油液的流量。
当弹头进行程序飞行、景象匹配或克服干扰稳定飞行时,控制系统给舵机的四个控制回路发出相应的指令信号,经弹上再入控制放大器的变换放大,成为伺服阀的控制电流,伺服阀根据指令信号极性和大小,使伺服作动器的活塞杆产生相应的运动并经过摇臂带动空气舵的舵面摆动。
作动器活塞杆带动反馈电位器作相应的运动,输出一个正比舵摆角位置的反馈信号,并以负反馈的形式与指令信号进行综合比较,形成液压系统的闭环控制。空气舵在位置上产生相应的控制力矩,改变弹头的俯仰、偏航或滚转的姿态。随着弹头姿态的变化,指令信号不断地改变,空气舵摆角在伺服作动器活塞杆的带动下亦随着控制指令同步变化,实现了舵面摆动的随动控制。
3 系统硬件设计与实现
根据某导弹再入空气舵机单元测试模拟训练装备的设计要求,按照“结构仿真、电气等效、信号模拟、现象一致”的原则,结合该导弹再入空气舵机及其单元测试的特点和工作原理,利用PLC智能控制、机电液一体化技术、虚拟现实等方法,确定了基于PLC的某导弹再入空气舵机单元测试模拟训练装备的硬件结构,如图2所示。

由图2不难看出,导弹再入空气舵机单元测试模拟训练装备硬件包含控制回路和能源回路两个不同回路。其中能源回路的功用是为系统提供一定的液压压力,为控制回路的正常工作提供能源,其主要设备有油箱、蓄能器、直流电动机、溢流活门、柱塞泵、安全阀门、油滤组件等。而系统的控制回路是再入空气舵机控制系统的核心,主要由电液伺服阀、伺服放大器、反馈电位器和作动筒等组成,其作用是为系统提供控制信号,控制能源回路执行机构产生相应的动作,反馈回路的作用是检测能源回路动作,进而判断整个再入空气舵机系统能否已按照控制指令完成相应的控制任务。
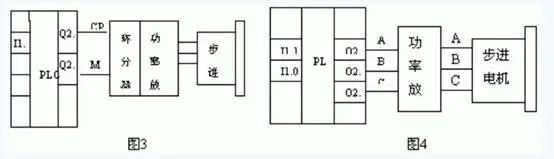
该系统的控制电路采取功能仿真的方法进行设计,使用PLC构成再入空气舵机单元测试模拟训练装备的控制系统。硬件部分的设计主要包括:PLC、驱动板、各设备电路、接口模块等部分。采用成熟的智能检测与控制方法,以PLC为核心,配合自主研发的驱动板和接口板,使系统能够实时地采集各种反馈信号并及时地输出相应的控制信号。综合各子系统不同的功能需求,采取成熟工业控制技术,设计制作了总线控制板、I/O输入输出板、A/D转换板、电机和数码管驱动板等各种功能接口板,完成信号采集、开关量控制、时序控制、电平转换等功能,并通过驱动板满足部分器件和电路的功率需求。外围接口模块主要结构如图3所示。

再入空气舵机控制单元测试电路功能模块主要采用对外接口功能仿真,即利用某导弹再入空气舵机单元测试模拟训练装备可以完成技术阵地再入空气舵机零位测试、运行时间测试、动态性能测试、静态性能测试等测试项目的测试,对再入空气舵机的频率特性、阶跃特性、位置特性进行全面的检测,同时系统能够实时地检测再入空气舵机油面压力、充气压力、液压油温度等主要技术指标;结合某导弹再入空气舵机单元测试流程,通过单元测试模拟软件,给导弹再入空气舵机发送各种控制指令,模拟装备根据系统发出的指令类型结合单元测试进程,模拟单元测试过程中的各种现象,并在测试操作面板上显示各种状态信息。再入空气舵机单元测试操作面板如图4所示。

PLC综合处理由再入空气舵机单元测试模拟训练装备发来的操作控制信号,将操作控制信号发送到外围接口设备处理模块,协调各分电路工作,实现各分系统信息同步;同时将相关的控制信号上传到教学机终端,进行操作训练监控与管理并实现多媒体教学互动。
导弹再入空气舵机单元测试模拟训练装备实时接收测试操作控制面板发送的控制信号,通过串口与上位机进行实时的信号传递,实现软件演示系统同步刷新电路、气路和液路工作原理演示的功能,可形象、直观地展现再入空气舵机各部件结构、工作过程及其连接关系,对操作号手掌握单元测试原理、认知再入空气舵机结构组成,具有很好的支撑作用。
4 系统软件设计与实现
为了提高编程效率,软件系统采用了模块化设计,主要包括主控软件、通信软件、故障诊断软件、虚拟仿真软件、教学管理软件等,系统软件组成框图如图5所示。

主控软件:主要是配合相应的硬件电路并进行控制逻辑和操作过程的仿真,完成再入空气舵机单元测试操作训练过程中各种信号的采集、计算、输出。在单元测试操作过程中,根据号手的操作动作在各显示界面之间进行跳转,并完成测试数据的自动判读。控制软件的控制流程图如图6所示。

通信软件:主要完成PLC与上位机以及PLC与各I/O模块之间通信,为了简化硬件设计,该系统采用的是RS232串行通信协议。
虚拟仿真软件:为了提高教学训练效果,系统采用Unity3D和Flash相结合的方法对系统的工作过程和工作原理进行动态演示,使操作号手能够直观的看到再入空气舵机单元测试过程中装备状态的变化情况。
故障诊断软件:主要是通过建立故障库的方法,记录操作动作,并结合操作流程进行分析判断,给出测试操作成绩,为操作号手的操作等级评定提供事实依据。

5 结论
本文研制的某导弹再入空气舵机单元测试模拟训练装备,硬件上综合运用了机电液一体化技术、嵌入式智能控制技术和虚拟仿真技术,集成了某导弹再入空气舵机单元测试的操作训练功能与理论教学功能,研制完成后的系统如图7所示。经部队和相关院校试用后,试验结果表明,该系统可完成某导弹技术阵地再入空气舵机零位测试、运行时间测试、动态性能测试、静态性能测试等测试项目,解决了再入空气舵机的频率特性、阶跃特性、位置特性测试过程中存在的工作过程难演示、工作原理难学习、故障现象难仿真等问题,减少了导弹部队动用实装训练的次数,保证了操作号手教学训练时间,提高了部队的训练效果和院校的教学质量。
参考文献:
[1]崔洪亮,刘庆宝,孙兴奇,等.导弹电液伺服机构仿真装置研制[J].电子产品世界,2015,22(10):38-41.
[2]周杰.数字式导弹舵机伺服控制器的设计与开发[D].电子科技大学,2009.
[3]崔业兵.制导火箭弹固定鸭式舵机滚转控制技术研究[D].南京理工大学,2014.
[4]李康.某武器平衡及定位电液伺服系统液压系统设计及控制[D].南京理工大学,2016.
[5]尤向荣,秦现生,张双权,等.电液伺服舵机加载系统设计与研究[J].机电一体化, 2010(8):42-46.
[6]林浩,李恩,梁自泽.具有非线性不确定参数的电液伺服系统自适应backstepping控制[J].控制理论与应用, 2016,33(2):181-188.
本文来源于《电子产品世界》2018年第7期第66页,欢迎您写论文时引用,并注明出处。









评论