
超声电机技术详解
电磁电机与超声电机比较
本文引用地址:http://www.amcfsurvey.com/article/201908/403688.htm一提到电动机人们可能马上想到电磁电机。从1820年奥斯特发现电磁作用,到1836年电磁电动机应用于印刷机上,仅用了十几年的时间。目前,电磁电机在日常生活和工业生产中都有着广泛的应用。电磁电机利用电磁效应把电能转换成机械能。一个常见的直流电磁电机的换能部件主要由定子和转子组成;定子产生一个固定的磁场,转子产生一个可以旋转的磁场;定子与转子不接触,而通过两个磁场的相互作用驱动转子转动。普通电磁电机的特点是转速快,每秒上千转。电动机的输出功率是力矩乘以转速,所以一般电磁电机的直接输出力矩都比较小。
20世纪90年代日本佳能公司研制出一种压电电动机,这种电动机的工作原理是利用逆压电效应把电能转换成机械能。常见的压电电机也是由定子和转子组成,但定子是由压电材料和金属材料组合制成,转子是由金属材料制成;压电材料把电能转换成机械振动能,激励定子金属体振动;转子与定子相接触,通过摩擦力,定子的振动驱动转子运动。由于定子的振动频率一般在大于20kHz的超声频段,因此人们也将压电电机称为超声电机。
早在1948年美国科学家威廉斯和布朗就申请了“超声电机”的专利。随后,很多人试图将超声电机的想法变成产品,都没有成功。1982年日本人指田提出了一个超声电机的设计方案;但直到1992年佳能公司才利用指田的方案制造出商业化的超声电机,并应用于照相机中,作为镜头调焦的驱动器。在此之后,许多国家都开展了超声电机的研究。目前超声电机已经广泛应用在光学仪器、高档轿车、精密仪器、自动控制、航空航天等许多领域。
超声电机的工作原理和工作效果与电磁电机完全不同,一个主要特点就是超声电机可以得到较低转速,因此输出力矩较大,可以省去减速机构直接带动负载。除了转速低,超声电机还有很多其他的特点::(1)因为超声电机不使用电磁场作为驱动力,因此电磁辐射小。许多情况下,不希望有电机产生强电磁干扰,或者在强磁场环境中,电磁电机的正常工作会受到影响;而超声电机不需要做太多的电磁屏蔽处理就可以在这些条件下工作。(2)超声电机依靠定、转子之间的接触摩擦作为驱动方式,关闭电源后转子就会马上停止,并在摩擦力的作用下固定不动;而步进电磁电机若要把所驱动的部件固定在一个位置上则需要电流来维持。(3)超声电机的响应时间较短,一般在十几毫秒以内。(4)超声电机没有电磁线圈,可以不用铜材,节省原料造价。(5)超声电机的转速可以通过改变驱动频率进行调节,比较灵活。(6)超声电机与电磁电机相比,还有一个最大的优势就是在小尺寸时,电磁电机的效率急剧降低,并且很难制作出直径在1mm量级的电磁电机,而超声电机在很小尺寸上都可以有效工作。
各种各样的超声电机
超声电机的工作原理,是把特殊形式的振动通过摩擦力转换成转动或平动。根据振动体的不同形式,可以制作出多种多样的超声电机。日本佳能相机中应用的超声电机就有两种。一种是环式电机,另一种是棒式电机。
环式电机的定子振动体和压在其上的转子都是圆环形薄片(图1)。电机工作时,在定子圆环上产生的是弯曲振动的行波。行波是沿着圆环的周向行进,圆环表面质点的振动轨迹是椭圆形。表面质点在波峰处,位移有一个平行于静止圆环的分量,这个分量通过摩擦驱动了与之接触的环形转子[图1(b)]。转子的中间放置镜头,转子的转动可以通过适当的机构转换成镜头的直线运动,以达到调焦的目的。由于这种环式超声电机是利用行波进行驱动,所以也称为行波超声电机。
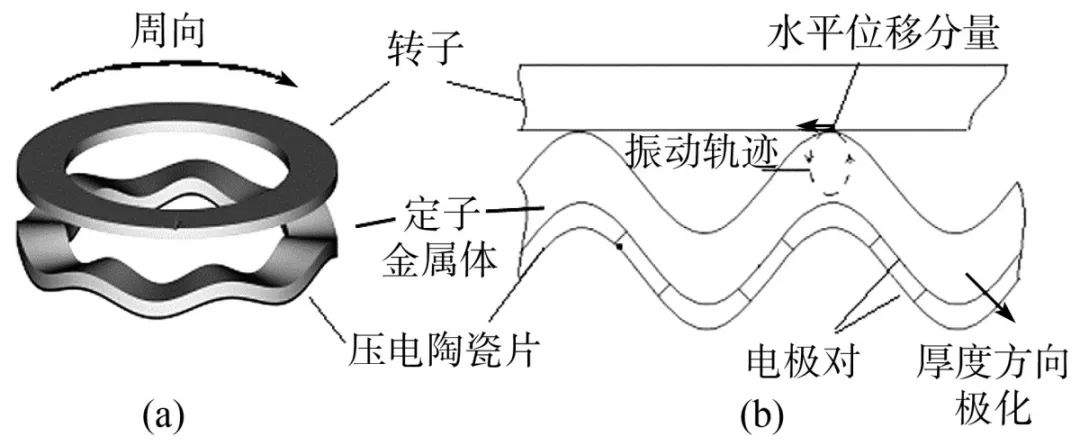
图1 行波超声电机工作原理
把转动转换成直线运动的方式很多,如图2所示,转子上连接一个圆筒,圆筒的侧壁上开有斜槽,圆筒的中间放置镜头筒,镜头筒的外壁上固定有销钉,销钉插在斜槽中。当转子转动时,斜槽推动销钉使镜头筒产生直线运动。
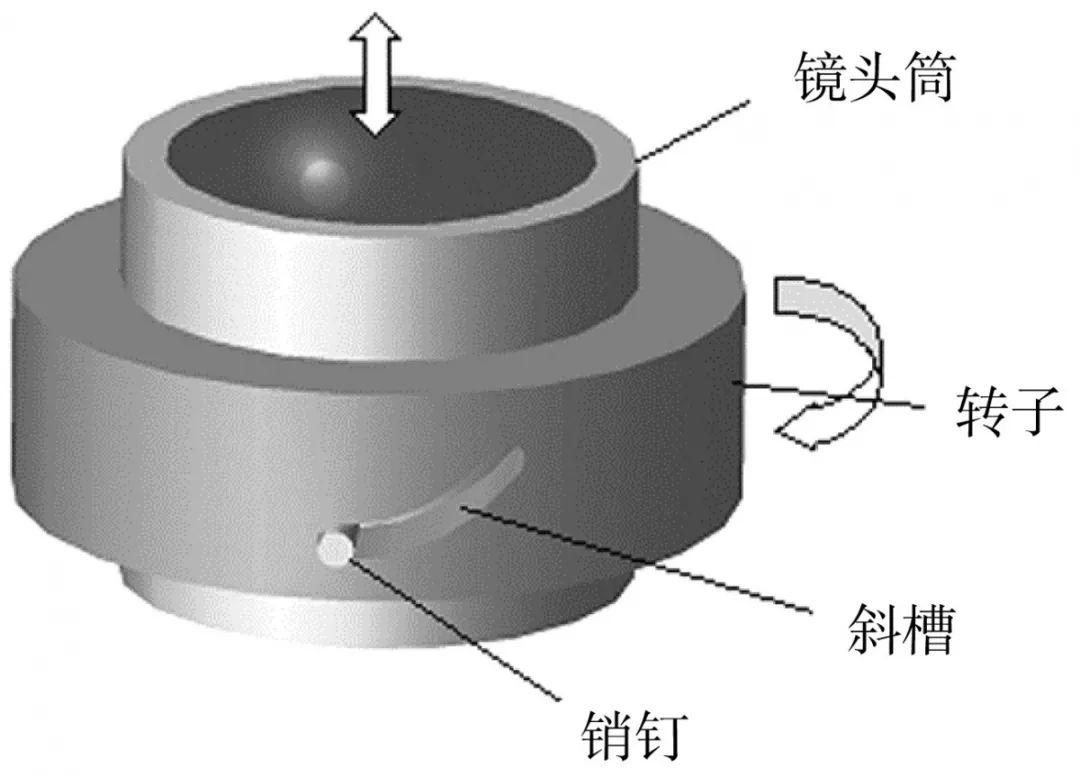
图2 转动转换成直线运动
环形行波超声电机的输出力矩一般不大。要得到较大力矩的行波超声电机,定子和转子都采用圆盘形,转子的中间和输出力矩的轴相联。定、转子的相互作用发生在圆盘的边缘处。
佳能相机中,棒式超声电机的工作方式有些像呼啦圈。定子是圆柱形。振动时,圆柱的轴线发生弯曲,这时定子端面上只有一个点与转子相接触(图2)。改变圆柱弯曲的方向,接触点的位置也改变。如果让接触点绕原轴线旋转,与定子相接触的转子被摩擦力驱动随着接触点发生转动。与呼啦圈类比,人的腰部对应于定子端面上的接触点,转子对应于圆圈。由于这种棒式超声电机的定子是做弯曲旋转运动,所以也被称为弯曲旋转超声电机,工作原理见图3。

图3 弯曲旋转超声电机工作原理图
(a)定、转子结构示意图
(b)分出4个电极对的压电陶瓷片
(c)定子激振原理图
棒式超声电机可以做得很小。目前最细的超声电机直径约为0.8mm,长度约为6mm。定子也采取弯曲旋转的形式运动。转速可以从300转/秒到3000转/秒之间变化。这种微型超声电机可以用作内窥镜的扫描驱动器。
棒式超声电机除了有弯曲旋转型,还有扭纵型。扭纵型电机沿着轴线纵振动,同时围绕轴线扭转振动。纵振动使定、转子之间交替分离和接触。在扭转振动的前半个周期,定子与转子接触,通过摩擦驱动它向一个方向转动;扭转振动的后半个周期,定子反方向扭动,但此时定、转子恰呈分离状态,转子不会反方向运动。每个周期都重复该过程,转子就能保持向同一个方向旋转。扭纵超声电机的输出力矩可以很大,目前能达到40牛米。由于这种电机要产生两种振动,根据设计规律就要求轴向尺寸很大,因而限制了它的应用范围。
一种大力矩行波超声电机可以弥补扭纵超声电机在尺寸上的不足。在普通的圆盘行波超声电机中,定子和转子都是悬臂梁结构,圆盘的中间是支撑处。因为超声电机是靠摩擦力产生输出力矩,因此要得到大力矩,可以增加定、转子之间的压力。但这会引起定子和转子的较大变形,而在设计时很难确定两个变形,因此不容易设计出较好的结构,得到大力矩。新型大力矩行波超声电机中,把振动体作为转子,把外壳作为定子,这样就只有转子是悬臂梁,改善了受力结构,使得设计上比较容易实现大力矩输出。大力矩行波超声电机的形状为圆盘形,厚度约为40mm,输出的力矩可以驱动小轿车的车窗玻璃。目前,这种超声电机的输出力矩可以达到8牛米。
目前世界上手机的拥有量非常巨大,并且大多数手机都带有照相功能。我们知道光学变焦的分辨率要高于数码变焦,但是带光学变焦的手机相机却很少见,主要是因为没有适用于驱动镜头变焦的电机。虽然佳能公司的两种超声电机已经很成功地应用在照相机的调焦机构中,但他们尺寸都很难再减小。而电磁电机在小尺寸时效率很低,耗电量急剧增加,无法满足使用要求。
为解决手机光学调焦的难题,一种螺母型超声电机应运而生。这种电机的定子为螺母型,用空心螺杆作转子,螺杆中空处放置镜头(图4)。在定子的内壁上产生的是垂直于内壁振动的环绕行波,与圆环行波超声电机相类似,行波波峰的运动驱动转子螺杆转动;螺纹驱动螺杆做直线运动,实现调焦。这种电机除了具有超声电机的一般优点外,还具有省电、体积小和抗震等优点。螺母型超声电机有望在近期应用于手机相机的光学调焦机构中。
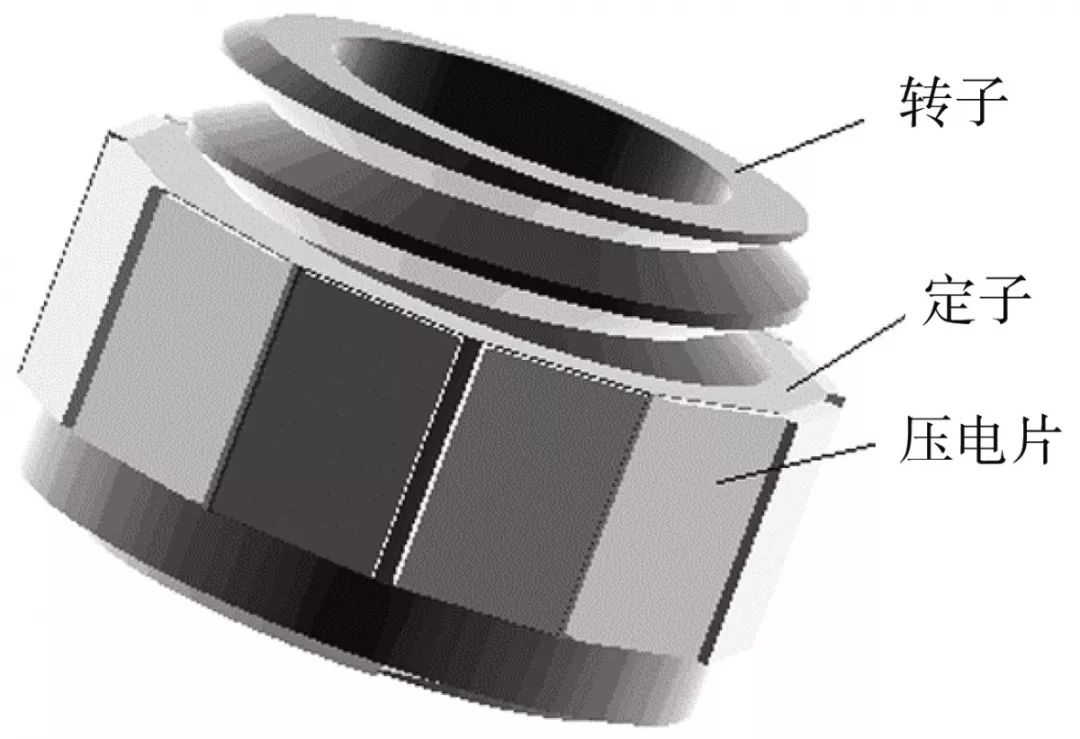
图4 螺母型超声电机结构示意图
根据超声电机的工作原理,超声电机还可以制作出许多不同的形式。例如,超声电机可以很容易实现直线运动;还可以实现多自由度运动。多自由度超声电机的转子是一个圆球,转子上可以放置多个环形定子,每一个定子的轴线就是一个转动轴,因此可以有多个转动方向。另外,超声电机的转速既可以很慢,也可以很快,非接触式高速超声电机可以达到每分钟上万转。
振动的形成
超声电机需要有振动源,一般采用压电陶瓷,把电能转换成机械能。压电材料有一个极化方向。如果在压电材料的极化方向上加电压时,当电场方向与极化方向一致或相反时,压电材料会在极化方向上发生伸长或缩短变形;如果在垂直于极化方向上加电压,就会产生剪切变形。
当电压方向交替变化时,就会产生交变的机械变形,即发生机械振动。振动的频率是和交流电的频率一致的。电机的机械振动频率在超声频段,因此超声电机需要一个超声频段的交流电源。适当设计定子的结构就可以得到需要的振动形式。例如,如图1(b)所示,要在环形行波超声电机的圆环表面上产生行波,可以把压电陶瓷片与金属圆环粘在一起;压电陶瓷片是在厚度方向上进行极化,两面上涂有银电极,沿着周向上分成许多对电极;当在厚度方向上加电压时,压电片在厚度上发生变形,同时根据弹性原理,在周向上也会发生变形。每对电极上加交变电压,使陶瓷片在周向上交变伸长和缩短。因为金属环和陶瓷片粘接在一起,因此金属环也交替发生伸长和缩短变形。如果电压交变频率与定子的振动模态频率一致,就会激励出相应模态的驻波振动。我们知道两个驻波可以形成一个行波,如果让相邻两对电极在空间和时间相位上都相差π/2,就可以激励出行波。
于此相类似,螺母型超声电机是在螺母型定子外壁粘上压电陶瓷片,每一个压电片上按适当的时序加电后,可以在螺母内壁产生行波。
佳能相机中的棒式超声电机的定子是两个金属圆环中间夹着压电陶瓷圆环组成,环的中心穿有螺栓把它们联在一起。压电环沿着周向分成4对电极,如图3(b)。加在相邻两个对电极上的电信号相差1/4周期,这样,在一个方向上,相对的两对电极上的电压相差1/2周期,在另外一个垂直方向上,相对的两对电极上的电压为零。如图3(c)所示,在y方向上对称的两对电极上加的电压相位相差1/2周期,一侧产生压缩变形,另一侧就产生伸长变形,整个定子柱就会向负y方向发生弯曲,而在x方向上没有发生变形。在1/4周期时间后,y方向上处于平衡位置,定子柱向正x方向弯曲。顺序改变电信号,可以使弯曲的方向依次变化,产生旋转的效果。
扭纵超声电机也是棒式电机。它的定子是由两个金属圆环中间夹着两组压电陶瓷圆环组成,见图5。一组压电环沿着厚度方向极化,用于产生轴线的纵振;另一组压电环沿着圆周方向极化,当在厚度方向上加电压时会产生剪切变形,用于产生扭转振动。两组压电陶瓷片上加的电压的频率相同,但有一个相位差。
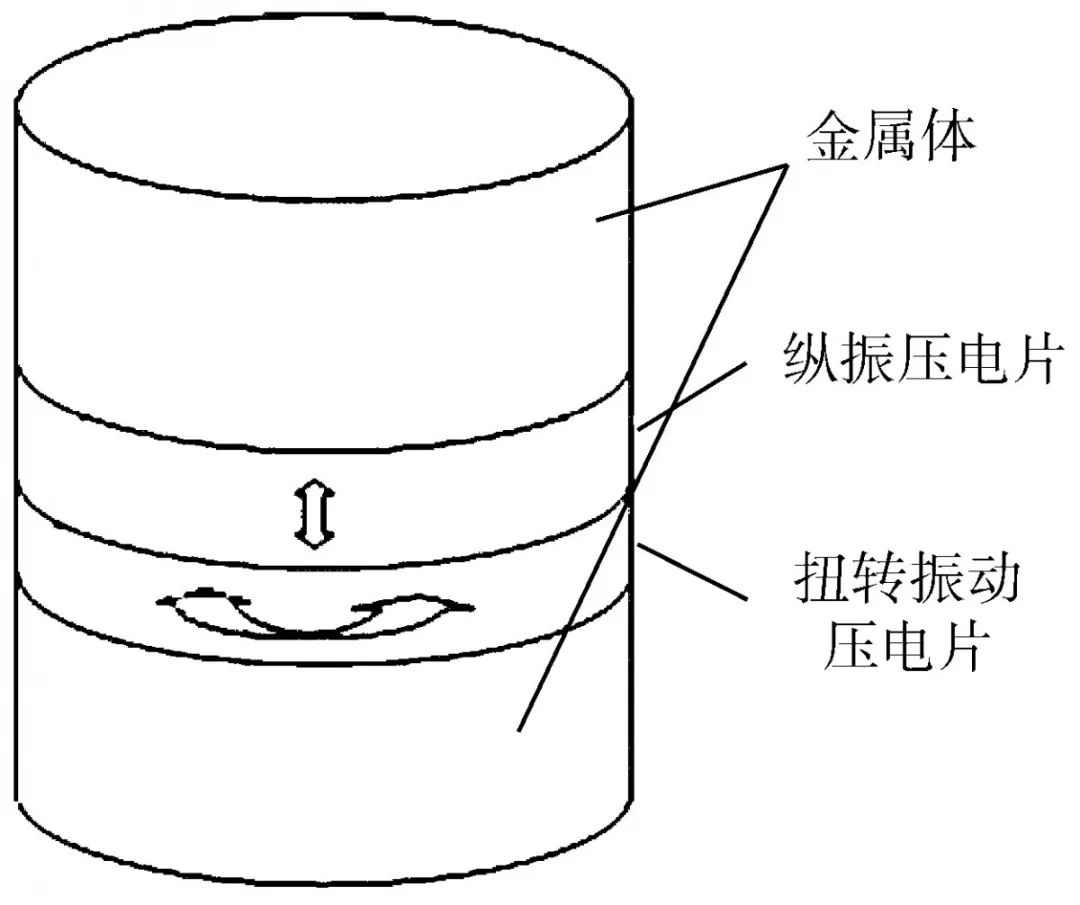
图5 扭转超声电机定子结构
还有一类超声电机为振动模态转换型。这类超声电机的振动源比较简单,一般只有单一的振动源,复杂的振动形式是靠结构来实现的。例如,在一个纵振棒的端部有特殊形状的多个齿,振动激励这些齿做复杂的运动,齿上压着的转子就会通过摩擦力产生转动。
超声电机研究进展、前沿和方向
超声电机的研究涉及超声学,压电学,摩擦学和电子学等多学科,非常复杂。这也是为什么超声电机从提出想法到实用花费了近50年时间的原因之一。
超声学中的主要问题是如何产生简单有效的振动;另外,在大力矩超声电机中如何考虑转子对振动体的影响也是一个难题。
压电学中的一个重要研究内容就是如何得到无铅的压电材料。压电材料种类很多,目前广泛采用的压电陶瓷为锆钛酸铅,含铅,对环境有污染。但因为这种材料性能优良价格低廉,目前其他压电材料无法相比。因此找到无铅的、能够替代目前采用的压电陶瓷是当务之急。
摩擦学方面,目前大多数应用的超声电机都是摩擦驱动型。而在超声振动条件下,接触面上摩擦的现象还需要深入研究。作为超声电机驱动机理研究中最为关注的超声振动对接触界面摩擦特性的影响被列为一万个科学难题之一。
电子学中的主要研究内容就是要得到低成本的智能控制系统。超声电机只有在高性能的驱动电路系统的配合下,才能显示出它的市场竞争优势来。
超声电机的研究方兴未艾,目前成本较高是限制其广泛应用的主要瓶颈之一。而我们期待着,随着科学技术的发展,超声电机的制造成本会逐步降低,在越来越多的地方发挥它的作用。











评论