
1KPZ-250型开沟铺管机GPS自动导航系统设计
摘要:以1KPZ-250型开沟铺管机为试验平台,采用RTK-GPS定位技术,进行农业机械自动导航试验。针对开沟铺管机液压驱动,履带式行走机构的特点,设计了左右履带行走速度控制与监测系统,实现了开沟铺管机行走自动控制。根据GPS接收机与车载传感器获取车辆姿态信息,采用PID控制方法,构建转向闭环控制系统,实现开沟铺管机的自动对行导航,并进行了开沟铺管机田间导航跟踪试验。试验结果表明,在开沟铺管机对行导航作业中,车辆行进速度不大于0.5m/s时,对行跟踪误差小于10cm,完全可以满足开沟铺管作业精度要求。
本文引用地址:http://www.amcfsurvey.com/article/139188.htm引言
我国北方以及沿海地区有着相当数量的盐碱地需要治理和改造,依靠人工开沟、铺管,不仅效率低,劳动强度大,作业成本高,而且工程质量难以保证。1KPZ-250型开沟铺管机是专用于暗管排碱技术的大型工程机械,可将渗管以精确的高程和坡度埋入地下,同时在渗管周围包上一定厚度的沙砾料。渗管的高程和坡度由激光制导系统来控制,而渗管铺设的直线度,需要人为在地头两端竖立标志杆,用于指引开沟铺管机上的驾驶员直线行驶。由于田间作业风沙大,驾驶员的驾驶水平及长时间枯燥乏味的跟踪驾驶,对开沟铺管作业的直线度有很大影响,并且需要专人竖立标杆,存在不安全因素。开沟铺管机实现GPS自动对行行走将有效地减轻驾驶员的劳动强度,减少劳动力,提高渗管铺设直线度精度。本文以1KPZ-250型开沟铺管机为平台,对其履带式行走机构进行电控设计,结合GPS技术与智能控制策略,使开沟铺管机能跟踪预设直线路径行走,实现开沟铺管自动导航作业。
开沟铺管机行走机构电控设计
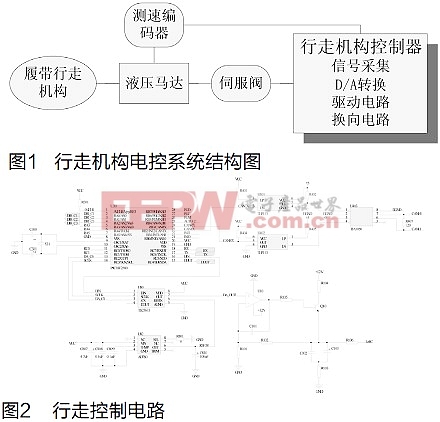
1KPZ-250型开沟铺管机采用液压驱动,履带式行走机构,左右履带各有一套液压驱动装置,通过调节伺服阀开度来改变驱动马达上的液压流量,从而控制左右履带行走速度。驱动马达上安装有测速编码器,通过采集编码器数字脉冲信号,可推算出左右履带行走速度。行走机构电控系统结构如图1所示。
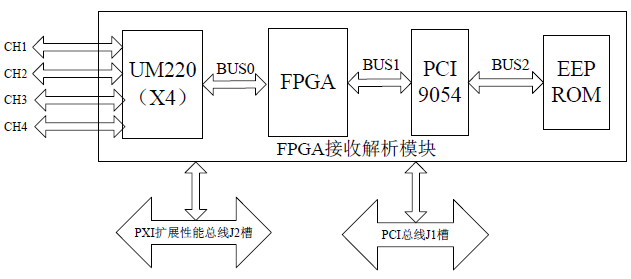
开沟铺管机行走控制器是硬件设计的核心部分,它由传感器信号采集、D/A转换、电压跟随驱动电路、微控制器和串行总线接口组成。主要控制电路设计如图2所示。微控制器采用Microchip公司的PIC18F2580。通过CAN总线与车载计算机进行数据通讯,布线简单,通讯可靠性高。通过数模D/A转换器将数字信号转换成电压模拟信号,D/A转换器采用TLC5615,与微控制器采用3线串行输入,10位数模转换输出,其参考电压源3V由芯片AD780提供,D/A转换分辨率为3mV/bit,使系统具有较高的转换输出精度。U10运算放大器与电阻R101、R102组成电压放大电路,Q10三极管提高驱动电路带负载的能力,输出信号通过限流电阻R106加载到电磁阀线圈上,可实现对电磁阀开度的控制,从而达到调节驱动马达转速的目的。微控制器采用定时计数方式对测速编码器信号进行采集,通过行走动力传动比,推算出左右履带的行走速度。整个系统采用24V工作电压,低功耗设计,与外部设备的接口进行光电隔离,降低外部干扰,提高系统工作可靠性。


pid控制相关文章:pid控制原理
pid控制器相关文章:pid控制器原理














评论