
基于DSP的太阳光线自动跟踪系统设计与实现
1 引言
精确捕捉太阳光线可提高太阳能装置,尤其是聚光类太阳能装置的太阳能利用率。现有的聚光类太阳能发电系统主要采用程序控制、传感器控制、程序与传感器联合控制的方法。程序控制方法是计算出太阳在一天中的位置,并通过电机驱动装置运动到目标位置,该方法可克服传感器控制的缺点,但存在累积误差,且程序复杂,对控制器要求较高;传感器控制方法是实时测量太阳光的方向,但实际应用中存在跟踪死区,跟踪范围窄;而程序与传感器混合控制的方法虽然在任何气候条件下都能得到稳定而可靠的跟踪控制,但由于成本和可靠性等问题,一直没有被规模化使用。为更好地采集太阳辐射能量,降低发电成本,提高跟踪装置可靠性,这里对太阳光线自动跟踪方法进行研究,并利用TMS320F2806型DSP为主控制器设计模拟跟踪控制系统。
2 跟踪方法
2.1 模拟跟踪装置
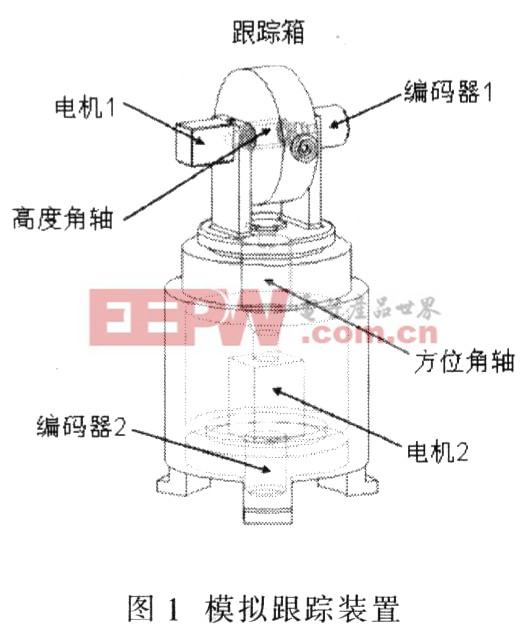
太阳光线的入射角是时刻变化的,为使跟踪装置在不同季节、不同日照时间都能精确地捕捉太阳光线人射角,机械结构采用双轴跟踪:利用高度角一方位角式全跟踪,通过两电机分别控制高度角轴与方位角轴位置,如图1所示。跟踪箱内装有跟踪传感器,电机1控制高度角轴,电机2控制方位角轴,两轴的合成运动使跟踪镜头始终跟随太阳入射光线。编码器1、编码器2分别检测高度角轴与方位角位置。
3.2 传感器检测电路
由跟踪策略可知,传感器需要检测的信号主要包括:光线强度、光电池一三象限电压差、二四象限电压差。这里主要介绍电压差检测电路。
由于光电池短路电流在很宽的光线强度范围内与光线强度成线性关系,在设计时利用其短路电流特性。在光电池的输出端串联取样电阻,将电流的变化转化为输入电压的变化。高度角与方位角跟踪原理相同,以高度角跟踪电路为例,信号检测电路如图3所示。
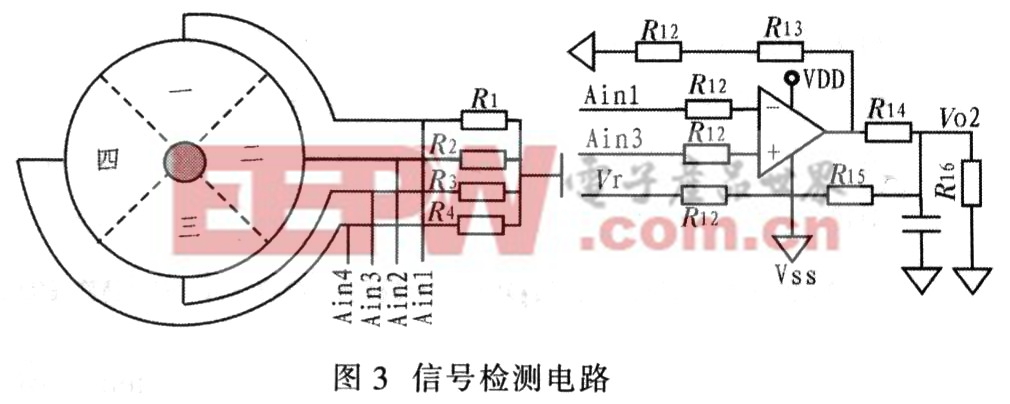
图3中Ain1、Ain3为采样输入端,分别连接光电池一三象限。当太阳光斑在光电池上移动时,光电池上一三象限的输出电流不等,经过电阻R1、R2采样后,送入差动放大器。R16为模拟量输入端的取样电阻,取电阻R13=R15。
由于所选控制器的模拟输入电压范围为0~3 V,而光线聚焦在光电池上形成光斑后,光电池两象限的电压差有正负。因此需在差动放大器同相输入端加一偏置电压Vr,使放大器输出的零点电压(当放大器两输入端均为零时,A/D转换模块检测的电压值)为1.5 V,以保证模拟输入电压始终为正值。根据运放工作在线性区的依据:(1)输入端电流为零;(2)U+=U-。假设采样输入端电压为Uin1、Uin3,经过计算得到通过R14的电流I为:
A/D转换器采样的模拟输入电压,即R16两端电压为:

当传感器主光轴对准入射光线高度角时,光电池一三象限压差Uin1-Uin3=0,此时VO2等于偏置电压的放大值,即电压基准值,设其为U,则:


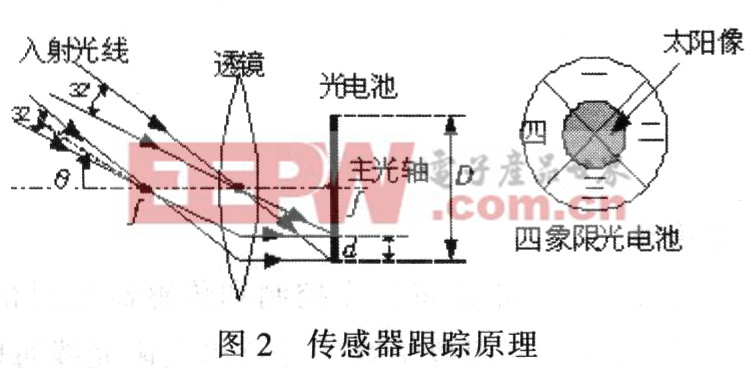
由式(4)和式(5)可知,在光电池直径恒定,且光斑完全落在光电池上时,若焦距f越大,则d越大,θ越小。即焦距越长,太阳像越大,光电池能检测的太阳光线范围越小。
所使用的透镜焦距为410 mm,光电池直径为25 mm,根据式(4)和式(5)可计算出光电池的检测范围为1.48°,太阳像直径约为3.8 mm,即当粗跟踪将传感器主光轴与太阳入射光线间的夹角调节至1.48°以内时,太阳像便能全部呈现在光电池上,若此时光强满足设定阈值,则可进入传感器跟踪。另外,透镜焦距会影响传感器跟踪分辨率(传感器能检测到的最小光线偏移角度),在其他影响因素一定的情况下,增加透镜焦距,有助于提高传感器的跟踪分辨率,但会降低传感器检测范围,此时就需要提高粗跟踪算法精度。因此,设计时在考虑增加透镜焦距以提高传感器分辨率的同时还必须考虑所选粗跟踪算法的跟踪精度要与传感器检测范围相吻合,以保证粗跟踪后太阳光斑能落到光电池上。












评论