
基于数字随动系统的PWM装置数学模型分析
由上式可得:
△U=Us’-Ud(s)/[2ρ(s)-1] (22)
万用表测得Us’=22.9 V,根据表1的数据和式(22)可得:当Ux11(s)=1 V时,△U=0.147 8 V;当UX11(s)=2 V时,△U=0.419 6 V;当UX11(s)=3 V时,△U=0.312 3 V;当UX11(s)=-1 V时,△U=0.348 1 V;当UX11(s)=-2 V时,△U=0.451 7V;当UX11(s)=-3V时,△U=0.4 226V。
根据GPWM平均值得ρ(s)实验式为:
ρ(s)测=0.5-0.092 7UX11(s) (23)
式(23)与式(19)比较,误差为0.325%。
根据△U的平均值可得Ud(s)实验公式为:
Ud(s)测=[2ρ(s)-1](Us’-0.365 35) (24)
将式(24)与式(18)比较可得,实际的电源电压Us是考虑了开关管的管压降后的电源电压。将式(23)代入式(24),可得:
Ud(s)测=-0.185 4UsUX11(s) (25)
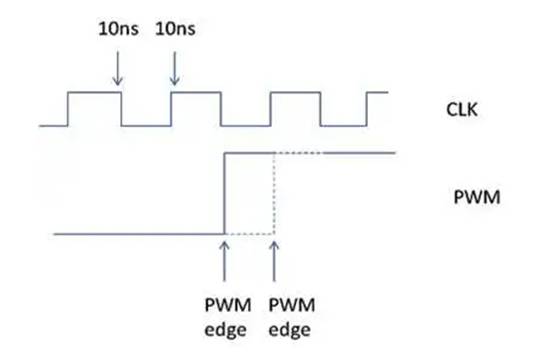
其中,Us=Us’-0.365 35=22.534 6,将式(25)与Ud(s)=-0.184 8UX11(s)比较,误差为0.325%,与ρ(s)的误差一致。但是PWM装置的响应会有延迟,假设延迟时间为ts(tT),则PWM装置的传递函数式为:![]() 。
。
4 结论
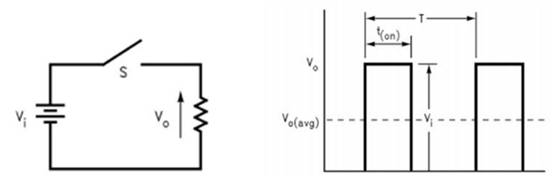
首先基于SKJ-II型数字随动系统,针对系统中的功率放大器环节,建立其数学模型,根据具体电路中的器件参数定量计算模型参数,确定具体的理论公式,并最终得到输入输出之间的传递函数关系式。清晰地分析证明了在一般的电力拖动自动控制系统中PWM装置可近似看成是一个带有纯滞后的比例环节。最后通过实验,进一步验证了理论推导的准确性。

pwm相关文章:pwm原理











评论