
倍福Beckhoff在步进电机控制中的应用研究
该系统为某主机电控系统,完成对光束的准直过程中的参数诊断、数据采集、闭环控制等实时控制功能以及与主控系统的通信功能。步进电机以性价比高,实时效果好,不需要昂贵的反馈系统著称,该系统中采用了一千多个步进电机来实现对光束的准直。神光原型采用控制卡控制大量步进电机,控制卡控制步进电机没有负载位置的反馈信号,实时效果差,故障定位非常困难;试验中采用西门子PLC(Programmable Logic Controller,可编程逻辑控制器)控制这些电机可靠性好,但控制少量步进电机时比较简单,控制大量步进电机时时序复杂,接线复杂,成本高,调试困难。最终方案采用德国Beckhoff公司的自动化产品,如嵌入式控制器,现场总线端子、步进电机总线端子等设备控制电机,该方案具有成本较低、操作简便、占用空间小等优点,也提高了系统的性能和可靠性,现已通过试验和评审进入调试阶段。
本文引用地址:http://www.amcfsurvey.com/article/163712.htm1 步进电机运动控制系统总体设计思想
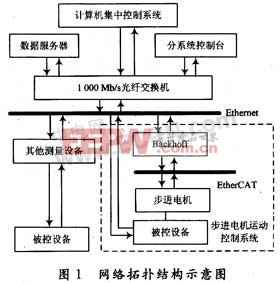
电控系统的总体设计思想为:控制系统设计应分别满足现场独立控制与远程集中控制,各子系统具备对系统各类设备的状态进行实时监测的功能,包括故障定位检测和报警;具备对系统各设备进行参数设置、参数采集、存储、处理等功能。主控计算机位于主控制室内,通过1 000 Mb/s光纤网络与分控计算机通信,分控计算机通过光纤交换机与控制设备采用工业以太网通信,其网络拓扑图如图1所示。
2 步进电机运动控制系统设计方案
2.1 倍福步进电机总体控制架构设计
采用基于嵌入式PC的模块化运动控制器,型号为CX1020,运动控制器本身集成双Ethernet接口,其中一个向上连接到现场工业以太网,接受运动控制的调用指令,另一个可以作为本地调试的网络接口。运动控制器、运动控制网络接口部件、步进电机驱动器通过硬实时的超高速以太网EtherCAT(Ethernet for Controland Automation Technology)构成运动控制网络系统,采用EtherCAT取代以往的现场总线传输技术,可以显著减少控制系统CPU的负荷,而且无需任何智能主站卡,适合集中式与分布式控制体系。
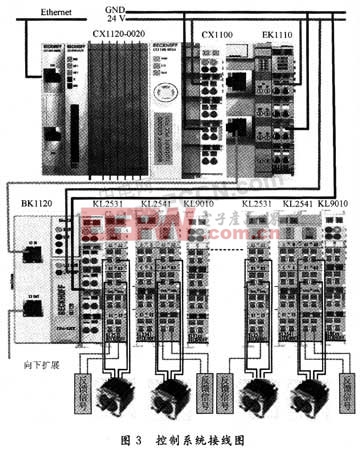
末端端子与底层EtherCAT总线耦合器端子BK1120相连,在本机架内总线耦合器通过K-Bus总线接口连接电机驱动总线端子KL2531和KL2541,步进电机直接连接在这两个端子上,如果使用KL2541端子,还需要在机架上安设数字输入端子KL1002,用于接人步进电机限位信号,最后在机架末端安放BK9010总线终端端子。
每级机架上总线耦合器BK1120的另一网络端口向下依次级联另一机架上的总线耦合器,最后从控制器到各级机架网络节点形成一个总线型的控制网络拓扑结构。KL2531和KL2541是步进电机总线端子,提供一路20 kHz的脉冲,可以各带一个步进电机。步进电机总体控制架构如图2所示。

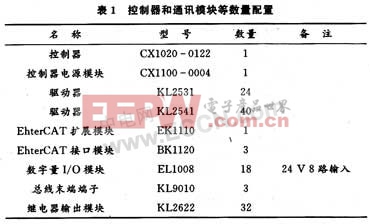
具体的控制器和通讯模块等数量配置见表1。
2.2 硬件组成
电机控制系统主要由控制服务器、运动控制器、电源模块、Ethernet交换数据的通讯模块和总线端子等组成。
2.3 重要器件概述
称重传感器相关文章:称重传感器原理












评论