
利用智能功率模块(IPM)来驱动三相感应马达(IM)
过去10年中,尽管永磁同步马达(PMSM)备受推崇,使用率也日益增加,但标准三相感应马达(IM)仍然是使用得最广泛的马达。启动IM最简单的办法是把马达直接接入三相交流电,以往业界采用星三角(Star-Delta)启动和软启动器(Soft-Starter)来克服直接启动(Direct-on-Line Start)时启动电流过高的问题。但上述所有方法都有一个共同特点,即驱动频率是固定的。频率转换器可以调节速度和电流。为此,必需根据所需动态响应来选择适合的控制策略。标量控制(V/f 控制)的简易性有助于确保稳健性,但另一方面,它只能满足一定的动态响应要求。要获得更高的动态响应性能,则需要采用矢量控制(磁场定向控制)。半导体供应商常常利用分立式IGBT解决方案来实现这些驱动,但现在,智能功率模块(IPM)开始取代分立式解决方案。这些新的解决方案可以帮助设计人员开发出具成本效益的解决方案。
本文引用地址:http://www.amcfsurvey.com/article/180346.htm在100瓦至数十万瓦功率范围内,IM是最常用的马达。它们的结构稳健简单、寿命长、成本相对较低,效率为中到高等。占主要市场份额的是通用IM,其主要特性是标准化,并能够按不同效率分类。这些马达在安装装置、机械尺寸、冷却,以及防止固体碰触与穿入和防水保护功能等方面都实现了标准化,这使得针对同一需求,不同厂商生产的马达在全球范围内能够很容易地相互替换。
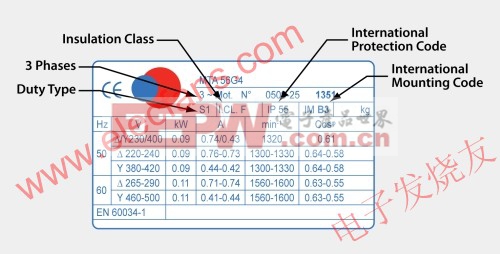
图1:感应马达的铭牌额定值。
图1所示为某个IM的典型铭牌额定值(rating plate)。这种底座安装型三相IM可以安装在地板、墙壁或天花板上(IM B3),并被设计为可在恒定负载(S1)下不中断地工作,能够防灰尘与水喷(IP 55),最大可耐受温度达75K(I.CL. F)。除了变频器馈入IM工作之外,IM还被应用于伺服器应用市场。在该市场,如果无需最高动态性能的话,伺服器驱动器是一个可选的解决方案。基于IM的伺服马达具有极高的动态响应,其紧凑的设计与低惯性可以带来出色的性能密度。为此,必需使用一个伺服器转换器。
利用变频器馈入IM
使用变频器可以实现AC马达所需电压和电流的调节。以往的局限性在于需使用直接启动、星三角启动、软启动器及类似技术,但这些技术已被变频器所淘汰,后者的基本设计如图2所示。其主要部分包含构成三相电压源逆变器(VSI)的6个IGBT/二极管和栅极驱动器。目前,智能功率模块(IPM)已成为越来越流行的替代解决方案。图中所示为一个典型的智能功率模块(SPM),其最大输出功率被设计为7kW。现在的驱动器已经可以实现四象限运行。利用按准确顺序排列的控制信号可以调节马达的电流和速度。如果图2中DC大电容的能量被制动斩波器所消耗,旋转的方向以及能量传输的方向则是可以选择的。

图2:三相电压源逆变器。
磁场定向控制(FOC)技术在三相AC马达中十分流行,用来实现驱动器的快速动态响应,它也是伺服应用的关键技术。这种技术方案模仿DC马达的工作,工作原理基于两个电流分量的完全解耦:鼠笼式马达中产生转矩的电流分量和产生磁通量的电流分量。图3所示为FOC的模块示意图,其中包含了所需的外围元件。利用Clarke 和 Park变换,可把3个时变输出电流(ia, ib, ic)转换为2个非时变数值(Id, Iq)。这样,最终的恒定DC值就很容易被控制。电流分量实测值与期望值之间的差异取决于IM所需速度,是PI控制器和Park逆变换的参考值。逆变换生成的时变电压(Va*, Vb*)是空间矢量调制(SVM)的输入信号。最后,SVM产生IPM的门控信号。AC马达的无传感器控制技术仍然是备受关注并不断发展的一个研究领域。在使用IM的情况下,无传感器控制可被简化,因为这时鼠笼式马达的定位并非马达工作所必需。如果需要速度控制,则转子位置可直接通过所谓的反电动势(BEMF)计算。
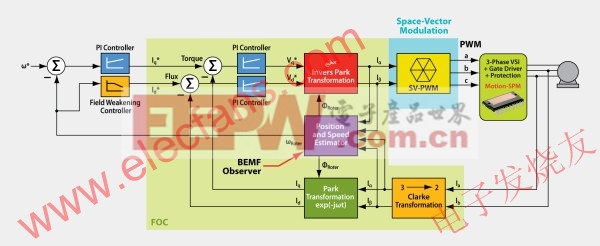
图3:FOC的模块示意图。













评论