
基于CAN总线的智能车的设计与实现
控制器局域网络CAN(Controller Area Network)是德国BOSCH公司为解决现代汽车中众多电子设备之间的数据交换而开发的一种串行数据通信协议,它具有高可靠性和良好的错误检测能力。汽车上主要有高速(500 kb/s)和低速(125 kb/s)两种CAN总线,这两种总线通过网关连接,实现两个局域网间的数据共享。
目前,随着对系统复杂化、精细化的要求越来越高,传统的集中控制从实时性和可靠性上越来越不能满足要求,分布控制逐渐得到了广泛应用。分布控制就是系统由一个主控制器和若干个分控制器组成,分控制器分别处理一部分系统功能,以并行或串行的方式与主控制器进行数据和信息的交互。
1 系统的总体设计
本设计主要完成了智能车在预先铺贴的道路上行驶。整个系统硬件组成框图如图1所示,包括采集节点和控制节点,它们之间通过CAN总线完成数据的交互。采集节点通过传感器采集道路信息,经过信号调理电路传送到微控制器,微控制器对信息进行处理后把数据发送到CAN总线上。控制节点读取总线上的数据并转换成控制命令,控制执行机构以确保智能车不偏离道路并且保持较高的速度。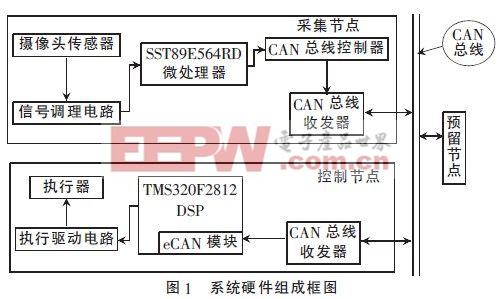
2 节点的硬件接口设计
2.1 采集节点SST89E564RD与CAN总线接口
SST89E564RD自身不具有CAN模块,因此扩展了CAN总线控制器,通过CAN总线收发器接入总线。本设计采用的CAN控制器是SJA1000,其兼容CAN2.0B协议,通过单片机对其进行初始化,主要实现数据的接收和发送等通信任务。收发器选用PCA82C250,它是一种应用广泛的CAN控制器与物理总线间的接口芯片,能够对总线的信息进行差动发送和接收。为了进一步提高系统的抗干扰能力,在PCA82C250和SJA1000之间用高速光耦6N137进行隔离,以降低由于不同节点的高共模电压引起的串扰甚至对器件的损坏,提高系统的可靠性,其通信速率高达10 Mb/s,完全能满足CAN总线需要。SST89E564RD与CAN总线的硬件接口如图2所示。
2.2 控制节点DSP 与CAN 总线接口
TMS320F2812 DSP 芯片内部集成了一个完整的增强型CAN 控制器, 称之为eCAN, 在硬件设计中,不需要再加入独立的CAN 控制器来实现CAN 总线的底层协议, 直接通过收发器PCA82C250 连接总线。DSP 与CAN总线接口设计如图3 所示。
















评论