
一份技能图谱告诉你,学习自动驾驶的路径就是这么简单
从2015年8月至今,近50个人工智能、前端开发、移动开发、云计算、架构、运维、安全、测试等IT技术领域的技能图谱陆续在GitHub上上线,帮助开发者、工程师梳理知识框架结构,并尝试提供路径指导和精华资源,方便技术人学习和成长。
本文引用地址:http://www.amcfsurvey.com/article/201801/374920.htm在时下非常受关注的自动驾驶领域,大部分开发者的感受都是只见树木不见森林,不知道如何建立对自动驾驶的宏观认知,不知道自动驾驶涉及的专业技能都有哪些,更不了解自动驾驶的学习路径。
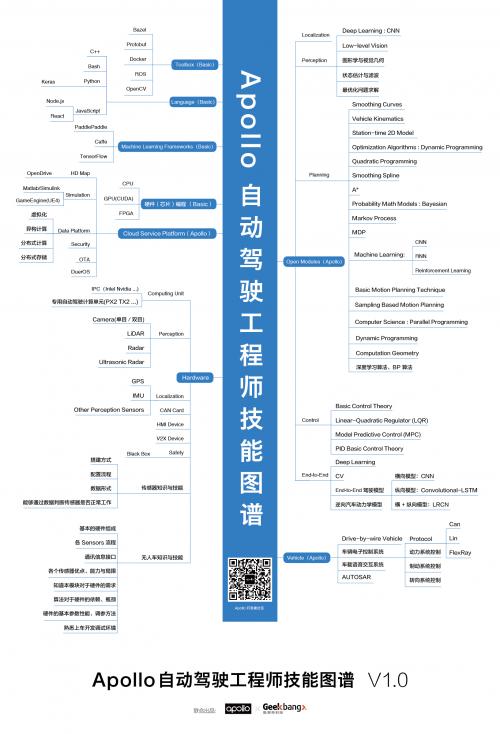
这也是极客邦科技联手百度Apollo团队,共同推出《Apollo 自动驾驶工程师技能图谱》的原因所在——希望Apollo将其在自动驾驶领域的研发实力、技术沉淀、行业洞察,以及 Apollo核心能力和技术框架,进行一个梳理和沉淀,为希望深入自动驾驶领域的开发者和工程师,呈现一个自动驾驶的技能全景图。
技能图谱十问十答
为什么这份技能图谱值得你收藏、甚至打印出来挂在办公室里或者书桌前?我们邀请这个技能图谱的策划人——Apollo布道师团队和技术团队进行解答。
问题1:为什么要规划这样一份技能图谱?
技术发展太快,技术模块涉及繁多,自动驾驶领域需要这样一个技术和技能的梳理,帮助自动驾驶工程师全面了解、快速学习和成长,也给有志于转行自动驾驶的技术人一个指引。
问题2:该技能图谱面向哪些人群?可以帮助学习者达到什么目标?
主要面向两类人群,他们都希望学习自动驾驶,他们或是学生,或是Apollo生态中的合作伙伴。一类就是懂得开发工具和语言开发的开发者和工程师,他们可以从这份技能图谱中补充机器学习和车辆相关的知识;另外一类人群就是机器学习从业者,他们可以通过这份技能图谱,深入了解自动驾驶的各个模块,因为Apollo不同模块之间的差异性大,即使对于百度内部工程师,这个技能图谱也有借鉴意义。
问题3:这份技能图谱包括哪些学习模块?模块设立和划分规则是什么?
这份技能图谱包括两大模块,首先是基础层,就是Apollo开发会用到的共性的语言和编程方式;其次是Apollo层,既包括Apollo开放的感知、决策规划、智能控制、End-to-End 等自动驾驶核心能力,也包括硬件,比如GPS、雷达、传感器、车辆相关的知识和技能。
问题4:这份技能图谱是怎么策划出来的?
在策划阶段,按照模型、算法、硬件、车辆相关背景知识四个维度,以问卷、面聊等多种形式,收集百度内部7、8个团队近30位技术专家的专业反馈,再把反馈按照目前的基础层、Apollo层整理分类,经历多次Review,最后与大家见面。
问题5:自动驾驶领域的开发者,哪部分的学习能力需要加强?
大部分自动驾驶开发者的『软实力』较强,硬件方面的学习能力相对较弱,尤其基于GPU 或者FPGA的芯片编程方面的能力继续增强。
问题6:对于学习Apollo的开发者来说,最大挑战是什么?
最大挑战就是Apollo运行起来,下一步该怎么做?因此Apollo会在2.0版本中开放很多调试、绘图、排查问题的工具;
另外的挑战就是硬件方面了,如果开发者买一个设备进行调试,在没有官方人员支持的情况下是比较困难的,因此Apollo把适配后的硬件设备发到GitHub,让开放设备在GitHub 上有现成实例,开发者改过之后就可以用。
问题7:自动驾驶人才需求缺口大吗?
非常大。目前我国汽车从业人员达到360万,但其中技术人才不到50万,占比不到15%。这其中虽然很难明确界定自动驾驶人才有多少,但是可以想见肯定不多。而且从自动驾驶专业人才年薪动辄几百万上千万,就可以知道人才有多紧缺。
问题8:目前Apollo最需要哪方面的人才?
目前会有很多合作伙伴寻求接入Apollo开放平台,为自己的产品注入自动驾驶能力。在接入过程中,车辆、硬件传感器的接入是开发者需要接受的第一关,需要掌握系统集成方面的知识。解决了集成问题后,对自动驾驶的要求就会往感知、决策规划、智能控制等模块方向进行转移。所以,了解整体Apollo结构的开发者,会是Apollo需要的人才;如果对其中某一模块非常熟知,也会是Apollo非常需要的人才。
问题9:自动驾驶开发者还有什么其他的学习路径?
开发者可以从搭建一个Apollo的Demo环境开始,学习Apollo相关模块的技能知识。在 Apollo的代码注释中,百度工程师列出了模型对应的参考资料,包括参考书或者论文,这也算是一个学习的捷径。如Apollo2.0新增控制器MPC,对应的源文件包含对该控制模型相关的资料推荐:
https://github.com/ApolloAuto/apollo/blob/master/modules/control/controller/mpc_controller.h
:
/**
* @class MPCController
*
* @brief LQR-Based lateral controller, to compute steering target.
* For more details, please refer to "Vehicle dynamics and control."
* Rajamani, Rajesh. Springer Science & Business Media, 2011.
*/
问题10:已经拿到技能图谱的同学,他们看过之后希望2.0版本有哪些改进?
能有各分支更细化的知识和技能表,包括推荐一些好的学习资源;
期望后续版本可以极大降低无人车成本,实现量产;
希望提供能力进阶地图;
希望细化知识点,把软硬件、算法的接口信息定义出来。







评论