
基于STM32F303 ARM Cortex M4 及L63982 的无人机电子速度控制器方案
无人机技术非常有趣,因为它涉及最先进的设计原则: 平衡飞行时间,尺寸和重量,稳定性,系统复杂性,逻辑,特殊功能和关键安全著陆等演习。
本文引用地址:http://www.amcfsurvey.com/article/202303/445102.htm无人机制造商通常需要开发以下不同的子系统来生产可行的最终产品:
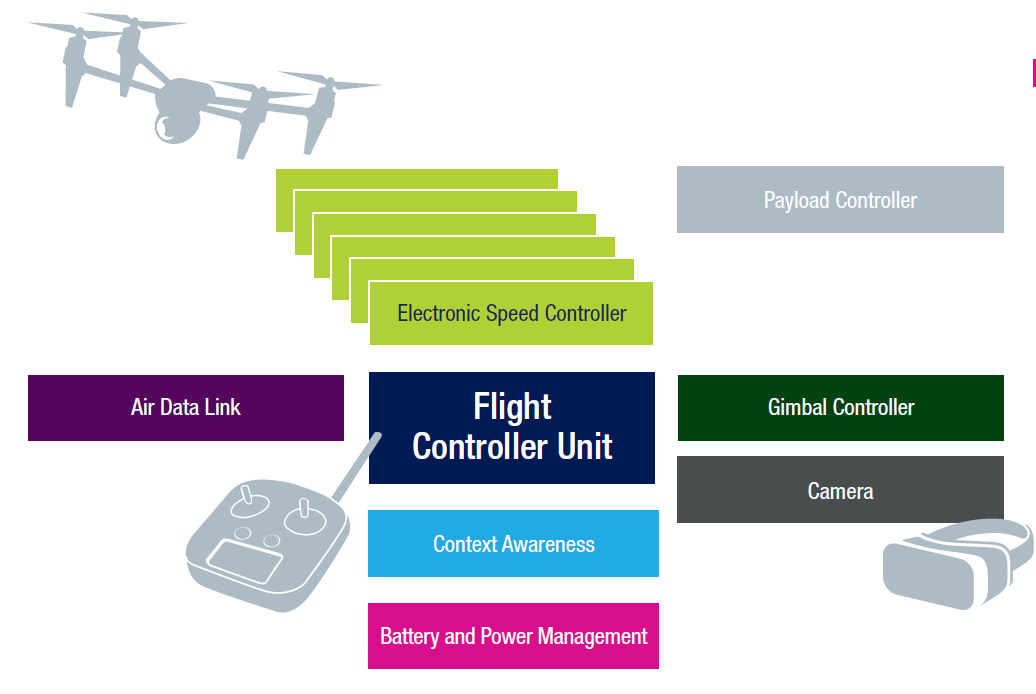
•飞行控制器单元(FCU),用于管理不同条件下的飞行,依赖其惯性测量单元(IMU)用于稳定无人机悬停。在专业无人机中,FCU嵌入了GPS(全球定位系统)形成自动驾驶系统。
•几乎四个电子速度控制器(ESC)用于控制电动机的复杂性算法,允许高转速,同时延长电池寿命。
•摄像机稳定器,通过伺服电机旋转和稳定摄像机。
•Air Data Link,用于远程控制和FCU命令的实时通信。
•高端无人机的电源管理阶段,可有效分配电池能量于不同的电机。
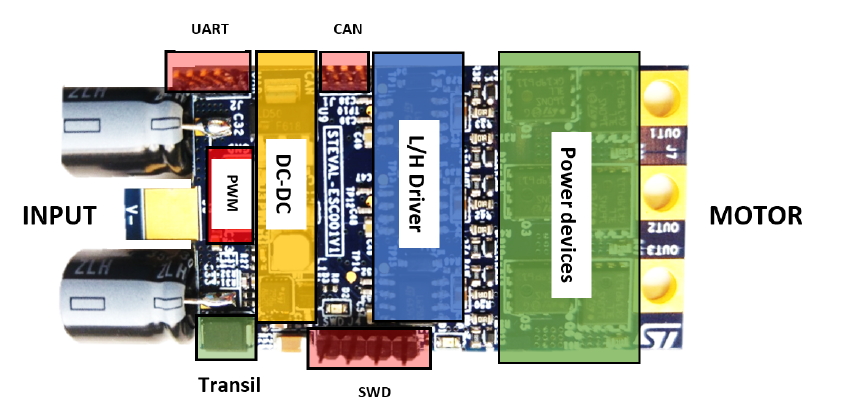
本电路板是用于无人机的电子速度控制器(ESC)(STEVAL-ESC001V1) 设??计适用于入门级商用无人机设计,并驱动任何三相无刷(或PMSM)电机运行6S LiPo电池组或任何等效直流电源,最多30A峰值电流。
由于完整的预配置固件包(STSW-ESC001V1),STEVAL-ESC001V1可让您在几分钟内旋转电机及其螺旋桨,实现无传感器磁场定向控制算法,具有3相电流读数,速度控制和全主动制动。
参考设计板可以通过PWM信号接收飞行控制单元的命令;其他通信总线接口,如UART,CAN和I²C也可用。
该参考嵌入了一个工作电压为5 V的电池消除电路,一个用于温度测量的NTC传感器和用于过流/过压保护(OCP / OVP)的电路。
紧凑的外形和电流能力使该参考设计适用于专业无人机等小型和轻型无人机上的电子速度控制器。
STSW-ESC001V1固件/软件包以及STM32 PMSM FOC软件开发套件 - MC库可让您通过STM32中嵌入的磁场定向控制参数来优化您的电子速度控制器设计,并使用ST电机分析仪进行实验,以快速检索电机参数。 ST无传感器FOC算法可确保更长的飞行时间和最佳的动态性能。
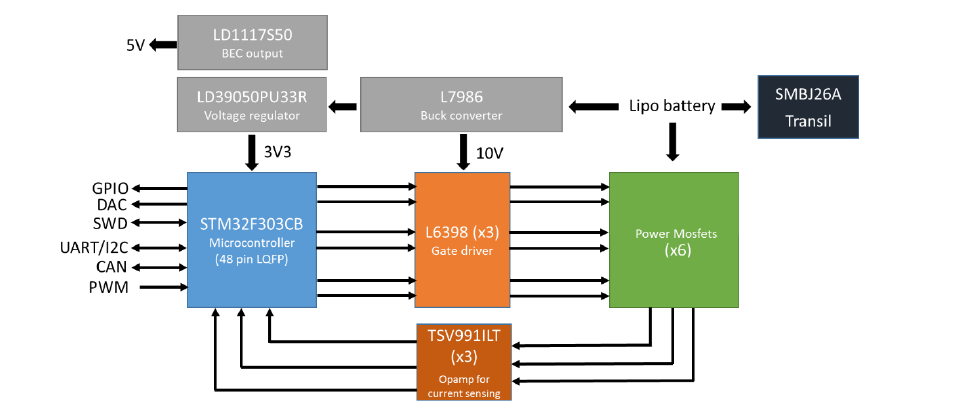
STEVAL-ESC001V1采用高效率,低Rdson STripFET F7功率MOSFET,高性能STM32F303CBT7微控制器和ARM®Cortex®-M4内核以及L6398驱动器设计。
延伸运用于遥控车辆的电机驱动:电动汽车,直升机,卡车等
任何三相BLDC或PMSM电机应用
硬建设计过程如下
反相器部分由L6398栅极驱动器,STL160N4F7和功率MOSFET组成。
L6398高压高低侧驱动器
L6398是采用BCD™“离线”技术制造的高压设备。 它是单芯片的一半N沟道功率MOSFET或IGBT的桥式栅极驱动器。
高侧(浮动)部分设计为可承受高达600 V的电压轨。逻辑输入为CMOS / TTL兼容低至3.3 V的电压,可轻松连接微控制器/ DSP。
主要特色:
高压轨,最高600 V
•dV / dt抗扰度在整个温度范围内为±50 V / ns
•驱动器电流能力:
– 290 mA源
– 430 mA灌电流
•1 nF负载时开关时间上升/下降75/35 ns
•3.3 V,5 V TTL / CMOS输入比较器,具有滞回
•集成自举二极管
•修复了320 ns的死区时间
•联锁功能
•紧凑而简化的布局
•物料清单减少
•灵活,便捷的设计
STL160N4F7 160 A STripFET™F7功率MOSFET
该N沟道功率MOSFET使用STripFET™F7技术,具有增强的沟槽栅极结构,使通态电阻非常低,同时还减少了内部电容和栅极电荷,从而实现了更快的更有效的切换。
L7986,LD1117S50和LD39050PU33R这些器件为栅极驱动,BEC输出和MCU电源提供适当的电压。
另外STSW-ESC001V1是STEVAL-ESC001V1的无传感器FOC参考设计程式
用于STEVAL-ESC001V1板的此程式软件包为无人机电子速度控制器(ESC)实施了无传感器的磁场定向控制(FOC)。 它包括当电动机失速时(例如,螺旋桨堵塞)的自动重启功能以及ESC撤防/撤防安全措施。
STSW-ESC001V1固件软件包包括三个部分:STEVAL-ESC001V1的电动机控制固件,用于通过ST Motor Profiler操作STEVAL-ESC001V1参数的PC软件插件以及项目文件。 适用于ST电机控制工作台(STSW-STM32100)。
无传感器FOC算法驱动电动机,固件通过PWM信号接受来自大多数常见飞行控制单元的命令; 开发人员还可以通过STEVAL-ESC001V1板上的相关连接器利用CAN,UART或I²C通信。
ST Motor Profiler的插件提供了实时的电动机参数信息,可帮助您快速使无人机飞行。
网页如下
►场景应用图

►产品实体图
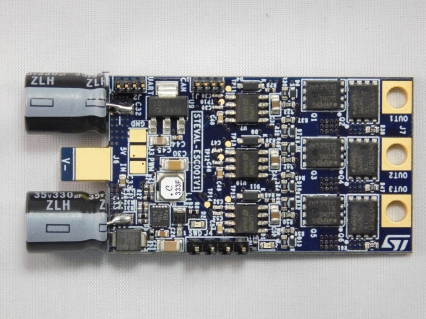
►展示板照片

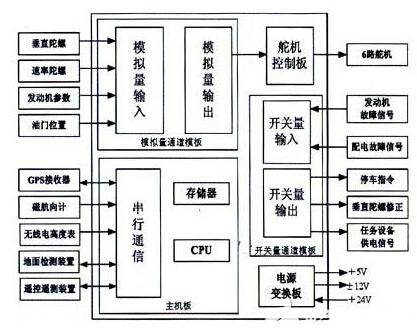
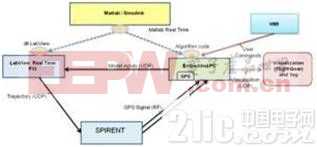
►方案方块图
►无人机架构
►核心技术优势
基于磁场定向控制(FOC),STEVAL-ESC001V1中使用了更复杂的控制算法;它的特点:
•更好的扭矩控制
•负载快速变化时的电机电流调节
•减振
•主动制动功能
•更高的效率
•降噪
•实时监控转子转速
•减速期间的能量回收
►方案规格
· 完整的电子速度控制器参考设计,实现无传感器FOC算法
· 专为配备6S LiPo电池的无人机或具有等效DC电源的系统而设计
· 电子速度控制器准备好与任何标准飞行控制单元(FCU)通信:PWM或CAN
· 温度过热保护
· 标称工作电压范围:3S-6S锂电池直流电压等级(11.1至22.2 V)
· 最大RMS输出电流:20 A rms
· 输出峰值电流:30 A.
· 去电池电路(BEC):外部接收器或FCU为5 V / 0.5 A.
· 提供完整的预配置程式包(STSW-ESC001V1)
· 由ST电机控制软件SDK和ST电机分析仪支持
· 紧凑的PCB设计:29.1 x 58 mm
更多目标应用:
· 遥控车辆的电机驱动:电动汽车,直升机,卡车等
· 任何三相BLDC或PMSM电机应用
· 符合RoHS和WEEE标准











评论