
使用 PICAXE 14M2 和步进电机构建红外跟踪器
一些电压基准具有专用的降噪端子。这些端子可用于过滤基准的噪声并实现更高的性能。然而,应该注意的是,此类中的每个电压基准可能需要不同的电路来实现噪声过滤。没有一种解决方案适用于所有这些电压基准。因此,在做任何事情之前,应该彻底研究设备数据表,以获取有关此主题的任何明确信息。
本文引用地址:http://www.amcfsurvey.com/article/202308/449332.htm红外光源
创建红外光源非常简单;您需要一个红外 LED(例如 LTE-5228A)、一个低压直流电源(例如电池)、一个限流电阻(以避免烧坏 LED)以及将所有部件连接在一起的电线。下图显示了一个示例。

请注意,正电压(红线)通过电阻器连接到 LED 的阳极,负极引线连接到阴极。电阻器可以位于正极引线(如图所示),也可以位于负极引线;无论哪种方式都同样有效。
您可以使用不同的组件和值来设计红外光源。个临界值是光的波长;它应该非常接近 935nm,因为这是 OP505A 光电晶体管灵敏度达到峰值的波长。
步进电机
快速在线搜索将提供大量有关步进电机的信息 - 超出您想要或需要了解的信息。事实上,AAC电子教科书的第13章有专门讨论该主题的页面。
没有必要在这里重复很多信息。可以这么说,步进电机通常是一种低压直流电机,包含磁铁和线圈,这些磁铁和线圈的排列使得以正确的顺序向绕组施加驱动电流将导致输出轴逐步旋转。根据步进电机的设计,步长可以大也可以小;大的步数会导致更“急躁”的运动,而较小的步数会导致更平滑的运动。旋转速度可以通过驱动电流从一个绕组移动到另一个绕组的速度来控制。
步进电机有两相或多相;两相步进器可以单极配置或双极配置驱动。这里选择的电机是单极电机。该项目使用单极驱动电路,但仅供记录,允许单极驱动的电机也可以由双极驱动电路控制。
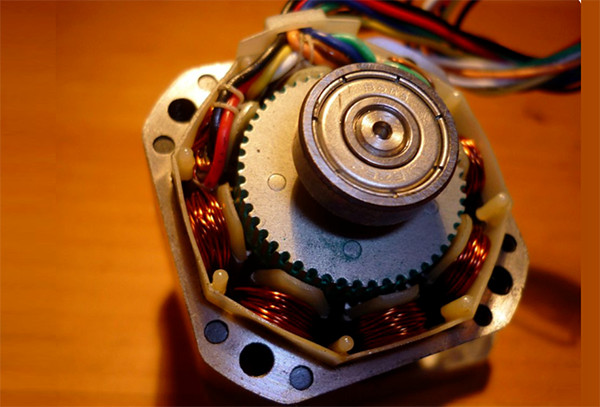
一些步进电机具有内部传动装置。这些齿轮通常被布置为减慢旋转并增加扭矩。该项目中使用的电机是小型齿轮步进电机,如下图所示。

如您所见,步进电机附带一块 PCB。PCB 上的电路包括一个 ULN2003A 集成电路,其中包含七个达林顿晶体管对,其中使用了四个。每对由两个 NPN 双极结型晶体管组成,用作低电流信号(例如微控制器的输出)和高电流负载(例如步进电机中的绕组)之间的接口。AAC电子教科书 第4章有关于达林顿对的讨论。
28BYJ-48 电机与许多步进电机一样,有四个绕组,每个绕组都可以单独通电。因此,控制 PCB 使用 ULN2003a 的四个输入(In1、In2、In3 和 In4)是有意义的,每个输入都通过达林顿驱动器连接到步进电机的四个绕组之一。请注意,从控制 PCB 到步进电机有五根电线,一根用于电源,四根用于连接四个绕组的信号线。提供一个 LED 及其限流电阻来指示何时向每个绕组供电。
控制板的原理图如下所示,注释提供了有关电路操作的附加信息。
![]()
示意图和完成的组装
该项目其余部分的示意图如下所示。为了查看整个电路,您必须使用此原理图和本文上一节中显示的步进电机控制器的原理图。

这是 PICAXE 14M2 的引脚图。请注意,只有两个 C 端口引脚具有 ADC(模数转换)功能:C.0 和 C.4。但三个光电晶体管中的每一个都必须连接到 ADC 引脚;幸运的是,B 端口有一个可用的 ADC 引脚:B.5。
该项目的整个原型组装如下所示。每个部件都有标签以与原理图上的名称一致。在开始构建之前,将原理图中的每个部件与照片中的相应组件进行比较。

请注意,示意图中红色矩形内显示了三个红外传感器(Q1、Q2 和 Q3)的光电晶体管阵列。在上面的完整组装照片中,三个光电晶体管连接到一小块穿孔板上,该穿孔板热粘合到步进电机的输出轴上。
该组件的其他细节如下图所示。光电晶体管阵列应水平安装并与步进电机的平顶平行。然而,三个光电晶体管的排列方向应略有不同;光电晶体管之间的 25 度角应该是完美的。












评论