
利用TLE4921-5U设计差分霍尔速度传感器
1. 概述
霍尔效应是常用的传感器感应技术之一,在汽车领域可以用于检测速度,角度,位移等。其中速度检测通常用差分式霍尔传感器。
速度传感器在设计时除需要满足系统电气要求外,还需要结合其实际使用环境如目标轮齿距,磁场强度,是否需要振动抑制算法,转速范围等。因此要设计好一款适合该系统应用的传感器,采集目标轮信息是很有必要的。
本文介绍如何利用TLE491-5U产品特性进行目标轮信息采集,通过分析传感器差分磁场信号,并结合传感器算法来选择适合应用的产品。
2. TLE4921-5U介绍
TLE4921-5U是基于霍尔原理的差分速度传感器,具有高灵敏度以及优异的温度稳定性和对称的阈值以实现稳定的占空比,通过测量磁通量的变化来检测目标轮的运动以及参考位置,可用于转速测量如轮速,变速箱速度,曲轴速度等。
如图1所示,TLE4921-5U主要由电源调整电路,霍尔探头,差分放大器,偏差补偿滤波器,施密特触发器以及集电极开路输出组成。
TLE4921-5U霍尔探头之间距离2.5mm,差分霍尔探头检测到磁场变化并产生差分信号,差分信号包含直流信号以及交流信号,差分信号经过高通滤波器及外部电容处理后可以消除直流偏移分量,交流信号通过比较Bop和Brp来控制开漏极电路的开通和关闭。
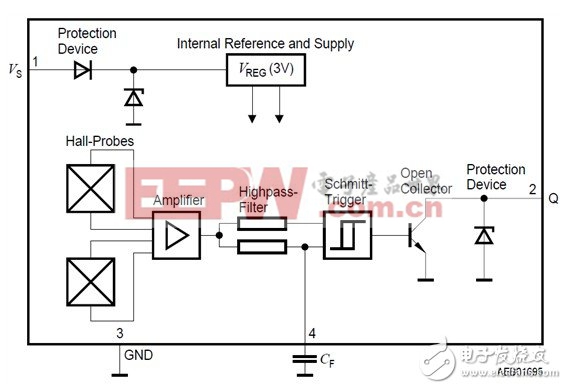
图1: TLE4921-5U系统框图
如图2是霍尔速度传感器差分信号产生及处理示意图,集成在芯片背面的磁铁提供传感器工作需要的恒定磁场,对于霍尔效应传感器,常用的背磁磁性材料主要有NdFeB,SmCo等稀土材料。当两个霍尔探头检测到相同磁场强度时,无论磁场强度强弱,其差值均为零,此时差分霍尔传感器感应到的信号为零。当两个霍尔探头检测到磁场变化时,便产生差分信号。差分信号幅值受差分磁场强度影响,差分磁场信号越强,则产生的差分信号越强,反之越弱。信号处理过程中,当差分信号超过ΔBrp时,集电极输出电路关断,此时输出端被上拉电阻上拉至电源电压,输出为高电平。当差分信号小于ΔBop时,集电极输出电路开路,此时由于集电极内阻远远低于上拉电阻,输出端被拉低到地,输出为低电平。
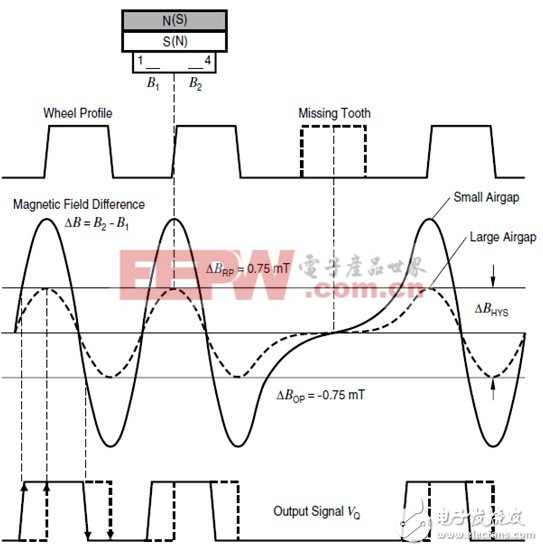
图2:传感器信号产生及处理
3.应用电路
前文已经谈到在信号处理过程中,芯片内部集成的高通滤波器,利用外部电容,通过一个时间常数后将差分信号调整到零点。因此当TLE4921-5U作为速度传感器使用时,外部滤波电容起到信号处理作用,电容异常将会影响到切换阈值,最终影响到数字输出信号。当TLE4921-5U用于传感器差分模拟量信号采集时,则不需要使用该滤波电容。
如图3为TLE4921-5U用于采集传感器差分信号的应用电路,管脚定义从左往右分别为电源,输出,地以及参考电容端。传感器1脚电源端和3脚地之间连接12V电源,2脚输出端悬空,4脚参考电容端不接电容,示波器差分探头连接参考电容端及地,用于测量差分信号。选择阻抗大于10兆欧

传感器相关文章:传感器工作原理
霍尔传感器相关文章:霍尔传感器工作原理
电容传感器相关文章:电容传感器原理 霍尔传感器相关文章:霍尔传感器原理 上拉电阻相关文章:上拉电阻原理 施密特触发器相关文章:施密特触发器原理








评论