

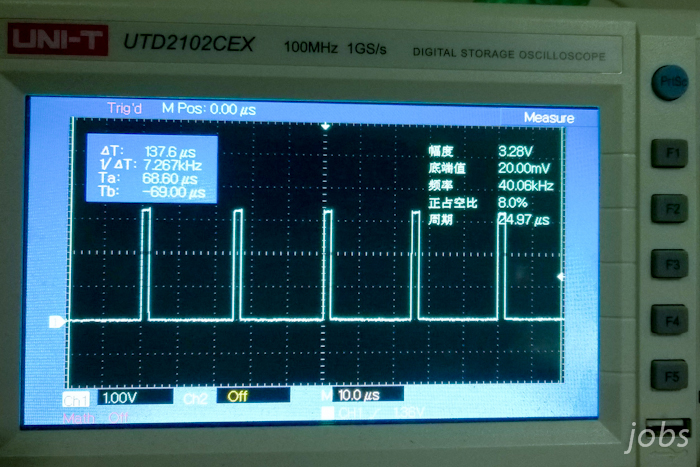
定时器是我们在嵌入式单片机里应用最广泛的外设。使用定时器的水平高低也决定着整个项目实施的水平高低。本次版主给大家带了使用TIM3定时器产生PWM示例。例程主要使用TIM3来产生40K频率的方波,占空比通过按键可调,按键按下时,占空比增加。
实例还是比较简单的,版主就不再多多叙述,大家直接看源代码吧!
源代码:
/**
* @brief tim3 pwm 40KHz
* @param
* @retval
* @date 2015-03-31
* @note
*/
void TIM3PWM(void)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
NVIC_InitTypeDef NVIC_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_GPIOB, ENABLE);
/* GPIOA Configuration: TIM3 CH4 (PB1) */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_1;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP ;
GPIO_Init(GPIOB, &GPIO_InitStructure);
GPIO_PinAFConfig(GPIOB, GPIO_PinSource1, GPIO_AF_1);
/* Enable the TIM3 gloabal Interrupt */
NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
TIM_TimeBaseStructure.TIM_Prescaler = 0; /*!< 分频为48MHz */
TIM_TimeBaseStructure.TIM_Period = 1199; /*!< 40KHz频率 */
TIM_TimeBaseStructure.TIM_ClockDivision = 0;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure);
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse = gCCR4_Val;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_Low;
TIM_OC4Init(TIM3, &TIM_OCInitStructure);
TIM_OC4PreloadConfig(TIM3, TIM_OCPreload_Disable);
TIM_Cmd(TIM3, ENABLE);
}
/**
* @brief key check
* @param
* @retval
* @date 2015-03-28
* @note
*/
void KeyCheck(void)
{
bool KeyStatus;
KeyStatus = KeyScan(0);
switch(gKeyStatus)
{
case 0: /*!< 空闲状态 */
{
if(KeyStatus == true)
{
gKeyStatus = 1;
}
else
{
gKeyStatus = 0;
LedOff(0);
gSendCmdStatus = 0;
}
break;
}
case 1: /*!< 消抖状态 */
{
if(KeyStatus == true)
{
gKeyCnt = 5;
gKeyStatus = 2;
}
else
{
gKeyCnt = 0;
gKeyStatus = 0;
}
break;
}
case 2: /*!< 按下状态 */
{
if(KeyStatus == true)
{
if(gKeyCnt == 0)
{
//按键按下执行内容
LedOn(0);
gSendCmdStatus |= 0x0F;
}
else
{
gKeyStatus = 2;
}
}
else
{
gKeyCnt = 0;
gKeyStatus = 0;
}
break;
}
case 3: /*!< 确认按下 */
{
LedOn(0);
break;
}
default: gKeyStatus = 0;
}
}
/**
* @brief uart_int
* @param
* @retval
* @date 2015-03-29
* @note 发送使用DMA方式,接收使用中断
*/
void UartConfig(uint32_t band)
{
USART_InitTypeDef USART_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
DMA_InitTypeDef DMA_InitStructure;
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_GPIOA, ENABLE);
RCC_APB2PeriphClockCmd (RCC_APB2Periph_USART1, ENABLE);
RCC_AHBPeriphClockCmd(RCC_AHBPeriph_DMA1, ENABLE);
/* Connect pin to Periph */
GPIO_PinAFConfig(GPIOA, GPIO_PinSource9, GPIO_AF_1);
GPIO_PinAFConfig(GPIOA, GPIO_PinSource10, GPIO_AF_1);
/* Configure pins as AF pushpull */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9 | GPIO_Pin_10;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL;
GPIO_Init(GPIOA, &GPIO_InitStructure);
USART_InitStructure.USART_BaudRate = band;
USART_InitStructure.USART_WordLength = USART_WordLength_8b;
USART_InitStructure.USART_StopBits = USART_StopBits_1;
USART_InitStructure.USART_Parity = USART_Parity_No;
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;
USART_Init(USART1, &USART_InitStructure);
/* NVIC configuration */
/* Enable the USARTx Interrupt */
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPriority = 0;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);
DMA_InitStructure.DMA_PeripheralDataSize = DMA_PeripheralDataSize_Byte;
DMA_InitStructure.DMA_MemoryDataSize = DMA_MemoryDataSize_Byte;
DMA_InitStructure.DMA_PeripheralInc = DMA_PeripheralInc_Disable;
DMA_InitStructure.DMA_MemoryInc = DMA_MemoryInc_Enable;
DMA_InitStructure.DMA_Mode = DMA_Mode_Normal;
DMA_InitStructure.DMA_M2M = DMA_M2M_Disable;
DMA_DeInit(DMA1_Channel2);
DMA_InitStructure.DMA_PeripheralBaseAddr = USART1_TDR_ADDRESS;
DMA_InitStructure.DMA_BufferSize = (uint16_t)256;
DMA_InitStructure.DMA_MemoryBaseAddr = (uint32_t)(&gSendBuf[0]);
DMA_InitStructure.DMA_DIR = DMA_DIR_PeripheralDST;
DMA_InitStructure.DMA_Priority = DMA_Priority_VeryHigh;
DMA_Init(DMA1_Channel2, &DMA_InitStructure);
USART_DMACmd(USART1, USART_DMAReq_Tx, ENABLE);
USART_Cmd(USART1, ENABLE);
}
void main(void)
{
uint16_t i;
int8_t Str[] = "hello EEPW\r\n";
gKeyStatus = 0;
bspInit();
gCntLed[0] = 500;
gCntLed[1] = 500;
TxIndex = 0;
gSendCnt = 12;
gRcvBuf[0] = 100;
gCCR4_Val = 99;
for(i = 0; i < gSendCnt; i++)
{
gSendBuf[i] = Str[i];
}
UartConfig(115200);
if (SysTick_Config(48000)) //参数为系统时钟的向上溢出值,此配置为48000,即1ms中断一次
{
/* Capture error */
while (1);
}
TIM3PWM();
while(1)
{
if(gCntLed[1] == 0)
{
LedToggle(1);
gCntLed[1] = gRcvBuf[0] * 4;
}
KeyCheck();
if(gSendCmdStatus > 0)
{
if(gSendCmdStatus < 0x10)
{
gCCR4_Val = gCCR4_Val + 100;
if(gCCR4_Val > 1000)
{
gCCR4_Val = 0;
}
TIM_SetCompare4(TIM3, gCCR4_Val);
DMA_Cmd(DMA1_Channel2, DISABLE);
DMA_SetCurrDataCounter(DMA1_Channel2, gSendCnt);
DMA_Cmd(DMA1_Channel2, ENABLE);
gSendCmdStatus |= 0xF0;
}
}
}
}
/**
* @brief SysTick_Handler的中断入口函数
* @param
* @retval
* @date 2014-11-23
* @note
*/
void SysTick_Handler(void)
{
if(gCntLed[0] > 0)
{
gCntLed[0]--;
}
else
{
gCntLed[0] = 0;
}
if(gCntLed[1] > 0)
{
gCntLed[1]--;
}
else
{
gCntLed[1] = 0;
}
if(gKeyCnt > 0)
{
gKeyCnt--;
}
else
{
gKeyCnt = 0;
}
}
/**
* @brief USART1_Handler的中断入口函数
* @param
* @retval
* @date 2015-03-29
* @note
*/
void USART1_IRQHandler(void)
{
if (USART_GetITStatus(USART1, USART_IT_RXNE) == SET)
{
gRcvBuf[0] = USART_ReceiveData(USART1);
}
}
工程文件:
 STM32
STM32 MCU
MCU 通讯及无线技术
通讯及无线技术 物联网技术
物联网技术 电子DIY
电子DIY 板卡试用
板卡试用 基础知识
基础知识 软件与操作系统
软件与操作系统 我爱生活
我爱生活 小e食堂
小e食堂