
无传感器无刷直流电机控制原理
目前常用的无刷直流电机控制方法可分为开环控制、转速负反馈控制和电压负反馈加电流正反馈控制等3 类。其中开环控制方式适合于转速精度要求不高的场合,转速负反馈方式适合于机械特性要求比较硬、转速精度比较高的场合,而电压负反馈电流正反馈方式则应用于动态性能要求比较高的场合。对于航模用的无刷直流电机,转速精度要求并不很高,使用开环控制方式就可满足要求。
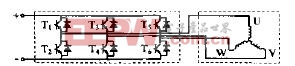
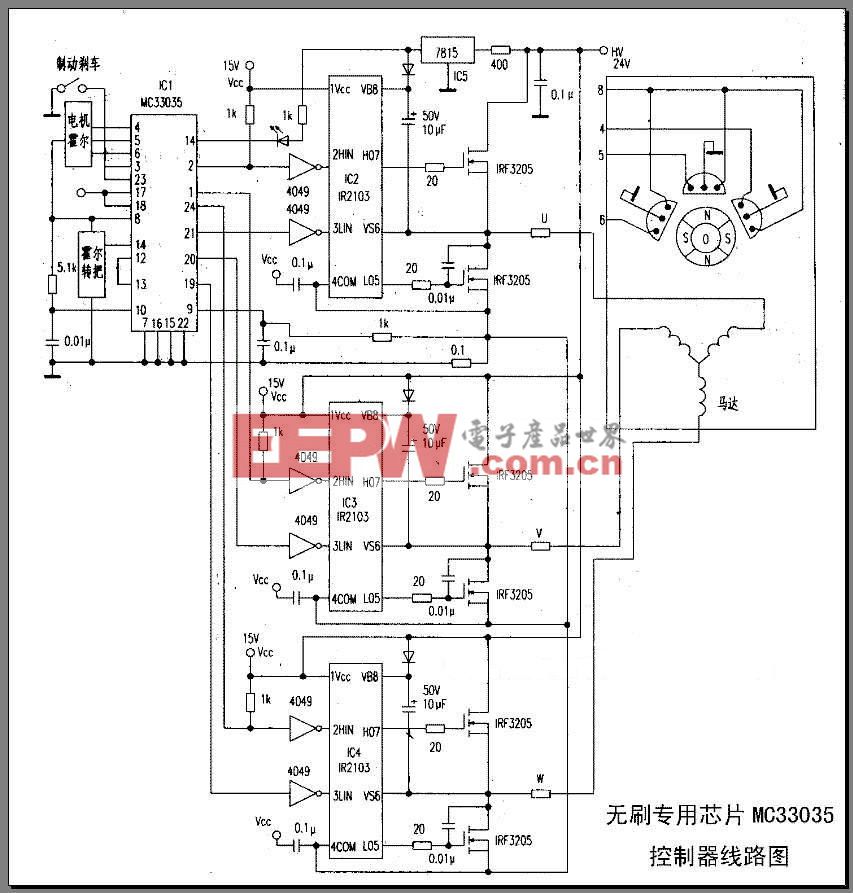
图1 是无刷直流电机的电路原理图[3]。
采用二相导通星形三相六状态控制策略时,其工作过程如下:
wt = 0º 电流:电源( + )→T1→U→V→T4→电源( - )
wt = 60º 电流:电源( + )→T1→U→W→T6→电源( - )
wt = 120º电流:电源( + )→T3→V→W→T6→电源( - )
wt = 180º电流:电源( + )→T3→V→U→T2→电源( - )
wt = 240º电流:电源( + )→T5→W→U→T2→电源( - )
wt = 300º电流:电源( + )→T5→W→V→T4→电源( - )
wt = 360º电流:电源( + )→T1→U→V→T4→电源( - )
由此可看出,只要转子在合适的位置及时准确地切换相应的开关管进行换流,电机就能平稳旋转并获得最大的转矩。
1.1 无位置传感器无刷直流电机位置检测方法选择无位置传感器无刷直流电机控制的一个关键点就是电机转子位置信息的检测与估计。作者在设计中使用了反电动势过零法[4]对转子位置进行检测。该方法具有线路简单、技术成熟、成本低廉等优点,当然也存在电机不转及转速很低时反电势无法检测的缺点。对于这些不足,作者使用了软件优化等方法予以克服。反电势过零法的工作原理如图2 所示,在任何时刻,电动机三相绕组只有两相导通,每相绕组正反相分别导通120º电角度。通过测量三相绕组端子及中性点相对于直流母线负端(或正端)的电位,当某端点电位与中性点电位相等时,则此时刻该相绕组反电动势过零,再过30º电角度就必须对功率器件进行换相。据此可设计过零检测及移相(或定时)电路,从而得到全桥驱动6 个功率器件的开关顺序。
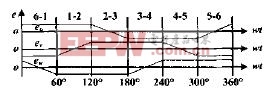
图2 反电势过零法的工作原理
由电机学原理[3]可得,三相的反电势过零检测方程为(以U 相为例)
1.2 PWM调制方式的选择
从图2 可见,永磁无刷直流电机每1 个周期由6个60º的扇区组成,每个元件导通120º,即在两个连续的扇区中导通。因此有半桥载波和全桥载波两种PWM 调制方式。对于永磁直流电机而言,无论是上半桥载波还是下半桥载波,截止相都会产生续流,导致其余两相电流产生波动,电机转速越高,相应的波动也就越大。而采用全桥载波,则始终有两相导通,截止相不会产生续流,电流波动和转矩脉动都较小。但全桥载波时功率管的开关损耗是半桥载波方式的2 倍。目前,已经有很多MCU 具有PWM 输出功能。使用MCU 自带的PWM 功能不需要增加外围电路。硬件PWM 不仅可以减少软件编制的难度,而且从速度和精度上讲,硬件PWM 都是优于软件PWM 的。
1.3 启动策略
启动方法分为硬件方式和软件方式两种。硬件方式因需要增加额外的电路,不适合于电路要求简单的航模控制领域。因此,作者在设计中使用了软件启动法。在电机静止和低速运行时,其反电势为零或极低,无法检测,因此采用外同步起动的方法。在电机起动时,先在某相加电压,然后检测过零点;若检测到过零点,就提前切换;如果检测不到就延时一段时间再切换。以此来使电机转速逐渐升高,当反电势足够大时,则进入正常运转方式。

pwm相关文章:pwm是什么
传感器相关文章:传感器工作原理







评论