
超低空分布式多传感器探测节点的设计
由于雷达探测存在盲区,低空与超低空飞行的入侵目标给雷达防御系统带来困难与威胁。基于GPS技术、多传感器技术、网络技术及单片机技术设计出一种分布式多传感器探测节点,把远程分布的多传感器探测节点所探测到的信息实时、有效地汇集在一起,实现超远距离的多传感器信息融合,实时进行目标发现,可弥补雷达防御系统存在的漏洞,有效地杜绝雷达防御系统存在的安全隐患。
本文引用地址:http://www.amcfsurvey.com/article/266071.htm1 引言
由于电磁波是沿直线传播的,受地球曲率的限制以及山地的影响,使雷达探测产生盲区, 看不到低空与超低空飞行的目标,所以低空目标给雷达探测带来困难与威胁。为了及早地发 现和探测中、低空,特别是超低空高速入侵的*、武装直升机等,就要解决远程探测 目标的问题。目前主要采用发展低空补盲雷达、采用升空平台监视雷达系统(如空中预警机 系统、系留气球载雷达系统、飞艇载雷达监视系统等)、改进和提高雷达的低空探测性能等 几种措施,提高雷达对空、对海警戒的作用距离[1]。这些措施有效地提高雷达对空、对海警 戒的作用距离,但造成了防御成本的大规模增加、雷达载体目标暴露易遭受对方的攻击等, 同时仍然存在着探测盲区,使安全防御系统存在一定的隐患。
针对以上问题,本文提出利用 MSP430F133 嵌入式微处理器设计出一种分布式多传感 器探测节点,可随机地分散地设置在雷达系统探测的盲区,利用GPS 系统授时和定位、利 用多传感器提供观测数据、利用GPRS 网络和互联网进行多传感器信息融合,实时进行目标发现、优化综合处理,获取状态估计、目标属性、行为意图、态势*估、威胁分析和辅助决 策等,可弥补雷达防御系统存在的不足之处,杜绝安全防御系统存在的隐患[2-4]。
2 分布式多传感器信息融合系统总体框架
整个分布式多传感器信息融合系统由若干个不规则分布的多传感器探测节点、 INTERNET 网络、监控中心服务器、交换机、数据库服务器、应用服务器、多传感器信息 融合终端和探测节点控制终端等组成,其总体结构如图1 所示。

当探测目标进入到多传感器探测节点所能够探测到的区域内,探测节点通过通信模块 (GPRS 模块)把传送数据分组,无线传送到GPRS 网络,再经INTERNET 网把数据传送 到监控中心服务器上。
监控中心服务器实时接收各探测节点传递过来得信息,并通过交换机与数据库服务器、 应用服务器、多传感器信息融合终端和探测节点控制终端进行数据交换。
信息融合终端对监控中心服务器收到的数据进行处理并通过其它服务器进行数据交换 实现信息融合,实时进行目标发现、优化综合处理,来获取状态估计、目标属性、行为意图、 态势*估、威胁分析和辅助决策等。
探测节点控制终端传送各种指令到各探测节点,监测各探测节点的运行状况,并对各探 测节点进行实时控制。
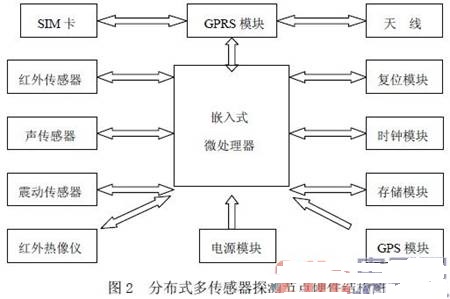
布式传感器探测节点硬件部分主要由通信模块(GPRS 模块)、GPS 模块、存储模块、 电源模块、时钟模块、复位模块、各种传感器和嵌入式微处理器组成,其硬件结构如图2 所示。

传感器相关文章:传感器工作原理
交换机相关文章:交换机工作原理











评论