
基于Linux的嵌入式数据采集系统
摘要: 数据采集系统是集计算机、通信及电子技术、工业控制为一体的综合探测系统。本文介绍了基于嵌入式Linux 的数据采集系统的硬件结构和软件设计。为提高系统的实时响应性能和多任务处理能力,在硬件上采用ARM9 微处理器技术,同时移植Linux操作系统,使系统的可靠性和可扩展性得以提高。设计中充分利用了嵌入式Linux 的特点。系统软件模块有数据采集模块、数据处理模块、数据通信模块和数据诊断模块。将嵌入式Linux 操作系统引入数据采集系统的设计中,加速了系统的开发,方便了将来的功能扩展,提高了观测数据的及时性和准确性,实现了观测的自动化。
关键字: 嵌入式Linux ,数据采集系统,设备驱动
1 嵌入式系统概述
嵌入式系统是以应用为中心、以计算机技术为基础、软件硬件可裁剪、适应应用系统,对功能、可靠性、成本、体积、功耗有严格要求的专用计算机系统,它将操作系统和功能软件集成于计算机硬件系统之中,简而言之就是系统的应用软件与系统的硬件一体化,类似于BIOS的工作方式,具有软件代码小,高度自动化,响应速度快等特点。特别适合于要求实时和多任务的体系。嵌入式系统是将先进的计算机技术、半导体技术、电子技术和各个行业实际应用相结合的产物。嵌入式系统的结构由两大模块组成:硬件平台和软件平台,其结构如图1所示。
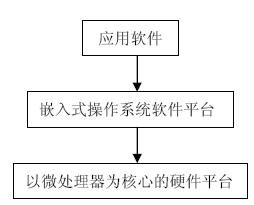
图1 嵌入式系统结构图
2 系统设计
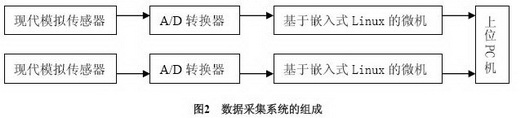
数据采集系统的采集任务在现场完成。采集系统设计为分布式的控制系统,系统上位机与现场检测下位机之间的通信基于串口。正常运行时,现场下位检测控制器完成数据采集、数据处理、数据存储、数据发送等多种任务。系统具有一定的自检测、自校正能力,能将异常情况传给PC机,以便维护。为了适应各种不同情况对焊缝自动检测的要求,整个检测系统采用模块化结构设计,可应用不同的模块组合成不同的应用系统。数据采集系统的基本组成如图2所示。
2.1 系统的硬件
数据采集系统主要完成实时数据采样、保持、并送入A/D 转换器变成数字信号,然后
再对数据进行计算处理、保存,再通过通信接口将实时数据发送到监控中心,同时接收监控中心下发的各种命令。其硬件结构如图3所示。
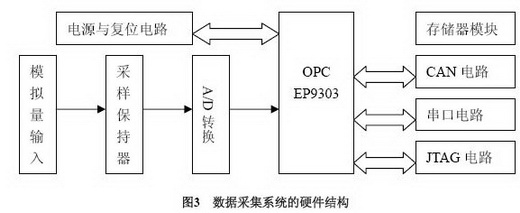
该系统采用了Cirrus Logic公司的EP9302作为主CPU,并移植Linux操作系统来对任务进行管理和调度。
交流采样电路主要由采样保持、多路开关和A/D转换组成,用来保证在模数转换过程中电压、电流的同时性,以满足功率测量要求。本系统采集四相电压及四相电流,通过多路开关分时将采样量送入A/D转换器。14位A/D转换电路采用Analog Devices的AD7865,AD7865 是四通道高速A/D转换器,其电路输出具有三态锁存功能。
通信电路由SJA1000芯片、光耦电路和总线驱动器组成。SJA1000的AD0?AD7连接到系统数据总线上,为了增强CAN总线节点的抗干扰能力,SJA1000的TX0和RX0并不是直接82C250 的TXD和RXD相连,而是通过高速光耦合器6N137与82C250相连,这样就很好地实现了总线上各CAN 节点间的电气隔离。光耦部分电路所采用的2个电源Vcc和Vdd必须完全隔离,可采用小功率电源隔离模块或带多个5V隔离输出的开关电源模块实现。这部分增加了接口电路的复杂性,但却提高了节点的稳定性和安全性。
2.2 系统的软件
软件的设计是在操作系统上实现的,嵌入式操作系统是整个系统的核心。针对本系统的特点,软件平台采用多任务嵌入式操作系统Linux来实现,改变了传统的在类似硬件平台下采用MSDOS单用户、单任务操作系统难以完成较为复杂的分布式多任务应用的缺点。在数据采集系统中,Linux系统可以同时处理多个传感器发送来的较为复杂的控制任务,从而提高系统的
整体响应速度及并发处理能力。构成嵌入式Linux系统至少需要下面3个基本元素:引导程序、Linux微内核和初始化进程。如果要让它有更多的功能, 还可加上文件系统、GUI和设计精简的应用程序,并将其放在diskonchip中启动。
2.2.1 内核的裁减编译与启动
微型计算机的存储空间较小, 而标准Linux是面向PC 的,需要对Linux 内核进行裁减。对一些可独立加上或卸下的功能块,可在编译内核时仅保留嵌入式系统所需的功能支持模块, 删除不需要的功能。为了满足一定的实时性要求,需屏蔽内核的虚拟内存管理机制来增强的Linux实时性。系统中微机主板属于X86体系结构,兼容一般桌面PC的Linuxi386版本。这
样,我们可以直接使用X86体系的编译器对Linux核心源代码直接进行编译及裁剪,并避免了对Linux 核心源代码中涉及CPU的部分模块以及内存管理模式模块的修改。增加了文件系统和GUI根据系统需要,文件系统应包括: 基本文件系统结构、基本应用程序、基本配置文件、基本设备/dev/hd* 和/dev/tty*、基本程序运行所需的函数库。GUI 是软件可视化设计不可
缺少的,也为将来的现场检修维护提供可视化的界面。编写Linux的引导代码, 将diskonchip作为系统的启动设备,引导代码放在diskonchip上。系统加电后,由引导代码进行基本的硬件初始化,然后把内核经映像装入内存运行。
2.2.2 设备驱动程序
系统需要对I/O口、串口编写设备驱动程序。设备驱动程序是操作系统内核与硬件之间的接口,属于内核的一部分,主要功能应包含:对设备初始化或释放、把数据从内核传送到硬件及从硬件读取数据、读取应用程序传送给设备的数据和回送应用程序请求的数据、监测和处理设备出现的异常。
设备驱动程序的实质就是中断处理。Linux中断处理程序分为上半部和下半部。上半部即一般的中断服务程序, 由硬件中断触发,一般运行在关中断的方式下,应当尽可能短小,处理尽可能快;下半部运行在开中断和任务串行化的环境下,处理需较长时间的任务。驱动程序上半部在处理完实时性很强的任务后,用queue_task函数将下半部处理函数挂入立即队列, 并用mark_bh函数来激活立即队列,下半部就可以最优先地被执行。
用户进程是通过设备文件与硬件打交道,对设备文件的操作方式是系统调用,由file_operations结构实现系统调用。这个结构的每一个成员的名字都对应着一个系统调用。用户进程对设备文件进行操作时,系统调用通过设备文件的主设备号找到相应的设备驱动程序,然后读取这个数据结构相应的函数指针,接着把控制权交给该函数。这就是Linux 设备驱动程序工作的基本原理。编写设备驱动程序的主要工作就是编写子函数,并填充file_operations的各个域。
设备驱动程序以模块方式加入内核,在init_module模块中,当检查设备存在后,用request_irq函数为设备申请系统中空闲的中断,用kmalloc为设备驱动程序申请输入输出缓存队列, 如果申请成功, 用regis2ter_chrdev函数将设备驱动程序注册到系统中,加载完成。在clearup_module模块中,先用free_irq函数释放申请到的中断,然后用kfree函数释放申请到的内存空间,最后用unregister_chrdev函数释放注册的设备驱动程序。

linux相关文章:linux教程







评论