
基于双DSP的并联控制系统中串行通信的研究
摘 要:概要地介绍了TMS320F2812 DSP 的基本性能,重点介绍了利用DSP 的SPI 模块进行双DSP 同步串行通信,以及在Visual Basic 6.0 下,利用MSComm 控件实现上位PC 机和下位DSP 之间异步串行通信的具体实现方式。最后给出了一个采用RS-232 串行通信标准实现信息传输的实例。串行通信简单,界面友好,应用领域广泛。
本文引用地址:http://www.amcfsurvey.com/article/157687.htm引言
随着数字信号处理器(DSP)在系统控制领域中的广泛应用,控制各系统的DSP 之间 通信问题也越来越突出。利用DSP 本身的高速同步串行接口(SPI)模块,可以让DSP 直 接对接实现芯片间的同步串行通信。有时为了充分利用PC 机资源,让一些在智能仪器上难以解决的问题诸如曲线显示等可以在PC 机上得以实现,这就需要DSP 内嵌的串行通信接口 (SCI)模块,实现DSP 与上位机的异步串行通讯。
本文所介绍的通信方法的背景是为课题组搭建双开关磁阻伺服电动机并联传动系统 (SRSD),系统使用的是TMS320F2812 芯片,具有SPI 模块和SCI 模块[1]。本文详细介绍 了SPI 模块和SCI 模块各自进行串行通信的硬件连接和软件实现方法,从而完成了基于 TMS320F2812 的双SRSD 系统通信模块的实现。
1 系统简介
双电机并联系统有很多优点,它比单电机系统在处理电机空间放置方式上更为灵活,并且有利于改进电机的特性。相对于单电机系统,在相同的输出情况下,双电机的总转动惯量更小,从而可以减少运行时的电能消耗。此外,当双电机中的一台损坏后,另一台仍可以在短时间内或适当减少负载的情况下继续运行,提高了系统的可靠性[3]。
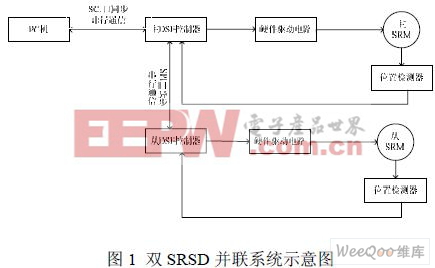
本文背景以SRSD 为主要研究对象,以位置输出为主要控制量。在单机系统的基础上, 经过改进,设计出双SRSD 并联系统,系统框图如图1 所示。
2 串行通信原理及特性
在计算机中,通常用8 位的二进制代码来表示一个字符,一条信息的各位字符的二进制代码被按由低到高位的顺序,依次地发送出去的通信方式叫做串行通信。它的特点是按位发送。根据信息的传送方向,串行通信可以分为单工通信、半双工通信和全双工通信。在本文中采用的是全双工的通信方式。串行通信按照传输方式的不同又可以分为同步方式和异步方 式。同步方式较复杂,但传送速率比异步方式高。本文中SPI 采用是同步方式,SCI 采用是 异步方式。












评论